Цифровий потік у керованій хірургії
Машинний переклад
Оригінальна стаття написана мовою PT (посилання для прочитання) .
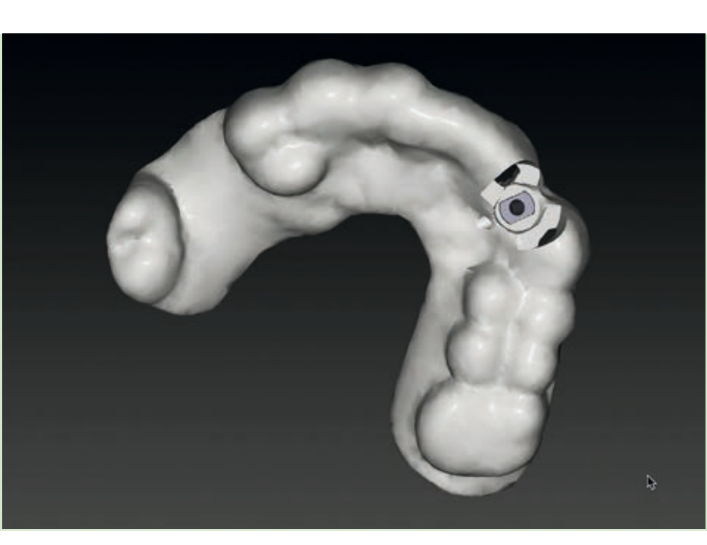
Використання перших остеоінтегрованих імплантатів для заміни відсутніх зубних елементів, майже 50 років тому, стало величезним кроком вперед у техніках стоматологічної реабілітації. Протягом років було запропоновано багато рішень з метою покращення клінічної ефективності зубних імплантатів. Форма імплантату еволюціонувала з введенням не лише циліндричних структур, більш ефективних спіральних дизайнів та кращих з'єднань імплантат-протез. Багато обробок поверхні також були запропоновані для модифікації наноструктури титану, покращуючи процеси остеоінтеграції та загоєння кістки. Наукова література погоджується, що реабілітації, підтримувані імплантатами, мають п'ятирічну виживаність приблизно 95% та понад 89% після 10 років. Однак поточна тенденція в хірургії імплантатів полягає в подальшому покращенні цих клінічних процедур, скорочуючи загальний час реабілітації, використовуючи при цьому менш інвазивні хірургічні техніки. Протоколи імплантатів, що керуються, можуть допомогти лікарям спростити свої процедури, починаючи з діагностичної фази до виконання остаточних протезних відновлень. Перший і, мабуть, найважливіший етап для розвитку цих нових клінічних процедур був введенням і поширенням тривимірної (3D) технології зображення та комп'ютеризованої технології. Це дозволило покращити традиційне передопераційне планування, в якому використовувалися рентгенівські оцінки, часто за допомогою періапікальних і панорамних рентгенограм, моделей дослідження та безпосередньої інспекції альвеолярних країв. Оцінка 3D-даних, отриманих з комп'ютерної томографії, а також, останнім часом, з інтраорального сканера, разом із сучасними програмами для планування імплантатів дозволяє ретельно моделювати хірургічні та протезні етапи.
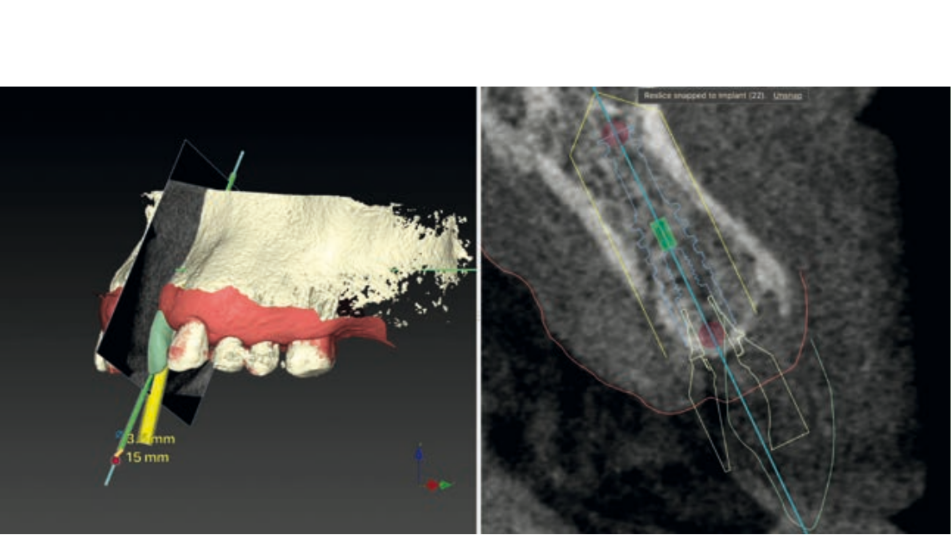
Місця для імплантатів можуть бути визначені до операції відповідно до обсягу та якості кістки, розташування анатомічних структур (нервів, судин або інших анатомічних структур), протезних та естетичних оцінок. Точні та індивідуальні вимірювання ширини та висоти кістки в запланованих місцях імплантатів, а також відстані та кути між імплантатами з одного боку на інший арки можуть бути попередньо визначені без спотворень, які присутні у двомірному форматі. Імплантати та опори можуть бути заплановані "віртуально", орієнтуючись на знання про положення запланованої реставрації. Це також дозволяє попередньо визначити шлях вставки протези, простір компонентів та вибір опор до операції, а також виробництво індивідуальних опор до операції. Точне планування віртуальної хірургії іноді дозволяє уникнути процедур збільшення кістки, які пов'язані з подовженням часу лікування і, на жаль, іноді також з серйозними клінічними ускладненнями. Крім того, ретельне тривимірне позиціонування імплантатів дозволяє досягти найкращих клінічних результатів, головним чином щодо естетичних аспектів.
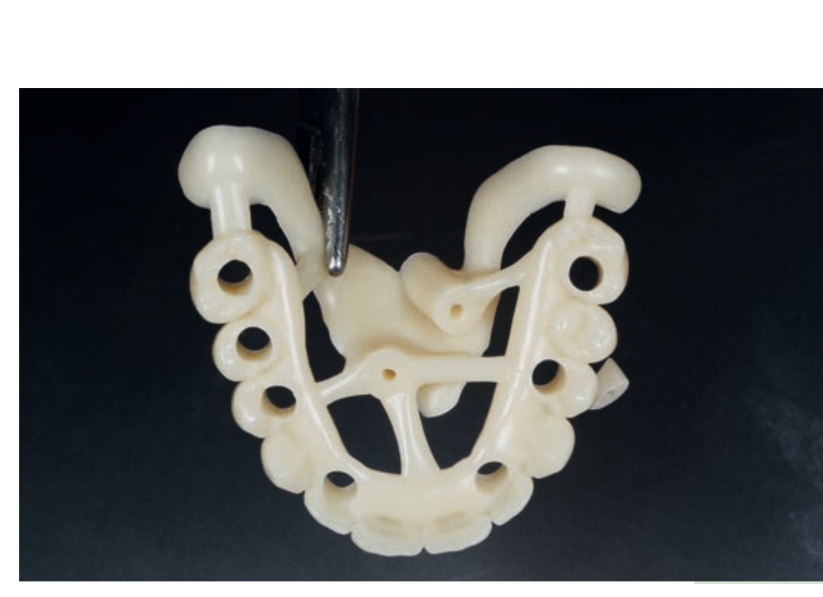
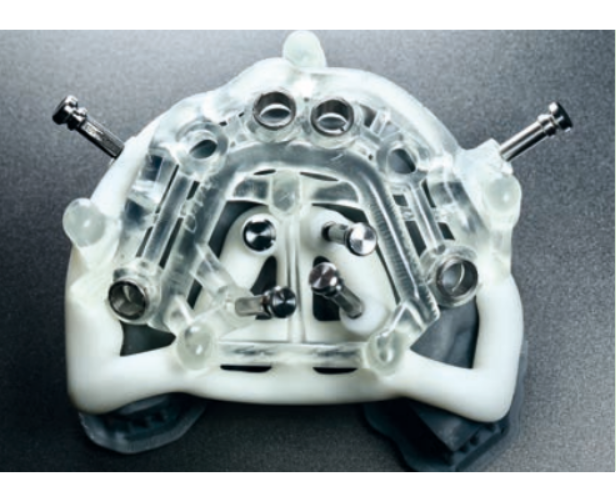
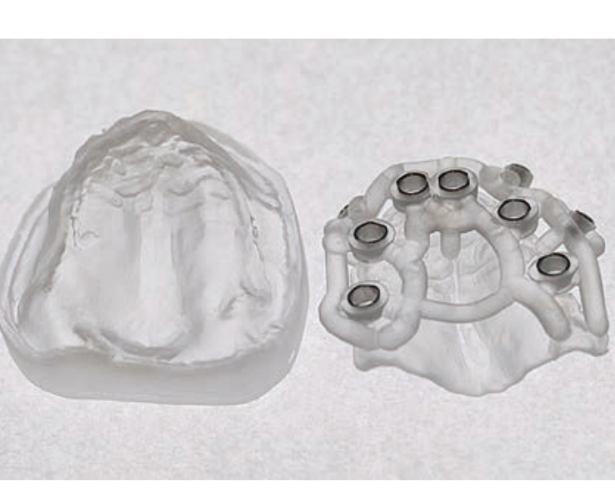
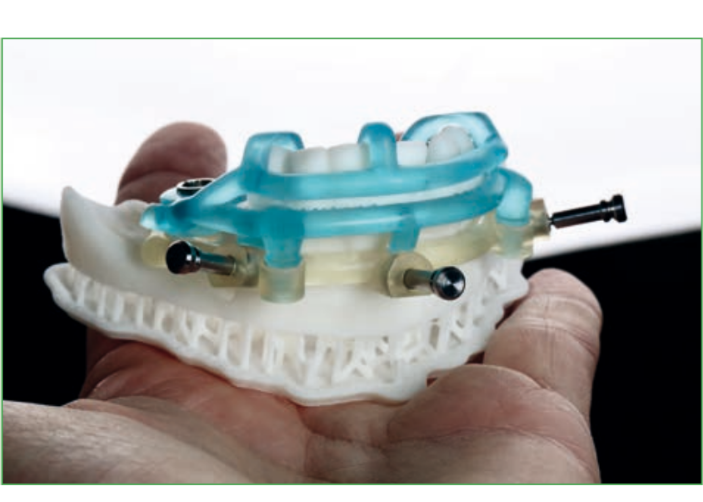
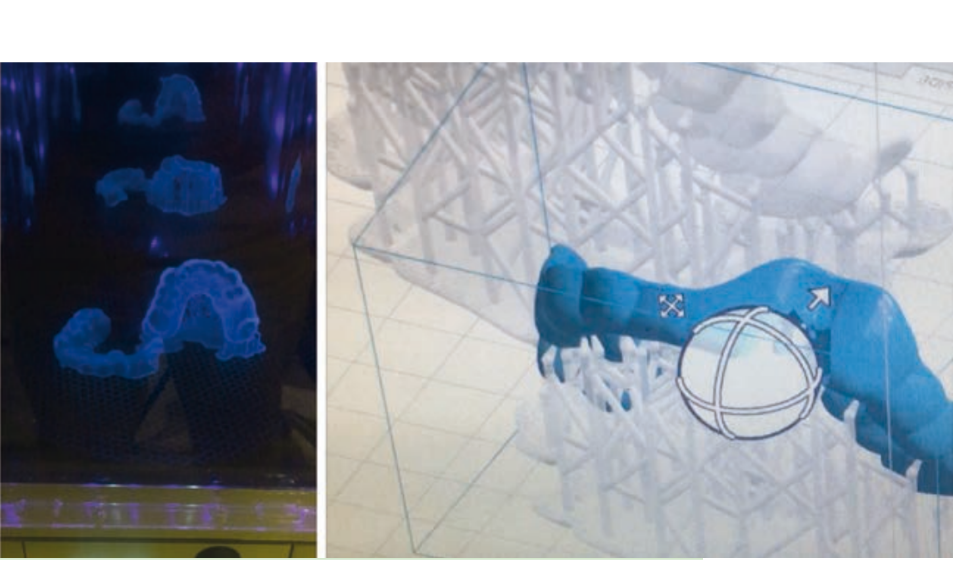
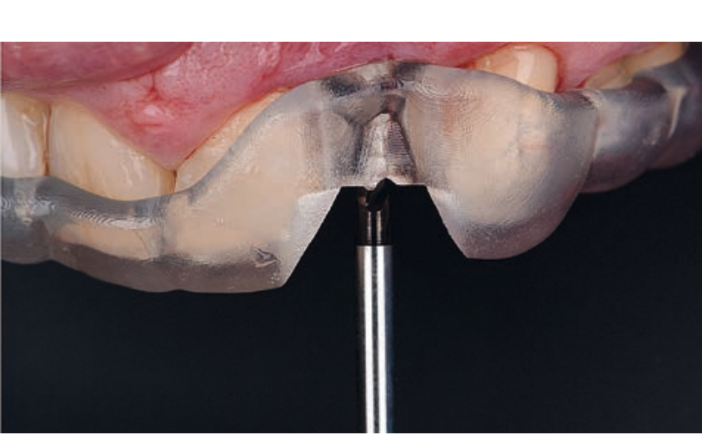
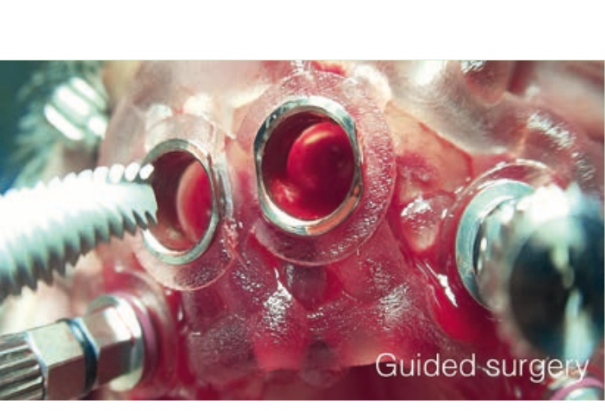
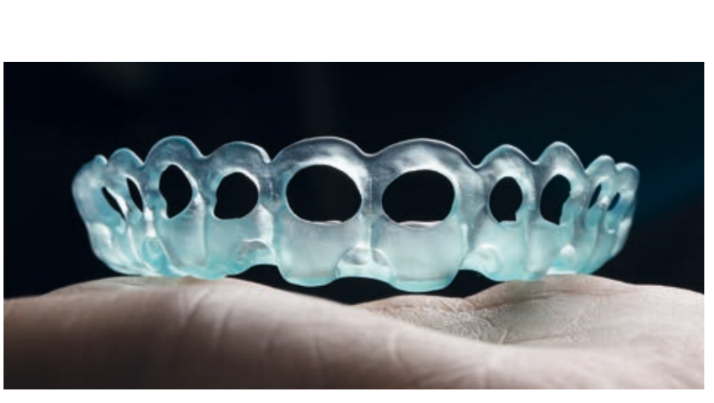
Хірургія імплантатів з використанням навігації дозволяє перенести запланований проект реабілітації безпосередньо в хірургічне поле. Лікар може вибрати з кількох навігаційних методів; спочатку хірургічні направляючі можна поділити на "статичні" та "динамічні". Останні представлені методами навігації, де комп'ютеризована навігаційна система допомагає лікарю в реальному часі під час позиціонування імплантату за допомогою візуальних зображень на моніторі. Ці методи, хоча і дуже цікаві з перспективи майбутнього, наразі не є особливо поширеними. "Статичні" методи, натомість, включають використання хірургічних направляючих, які можуть бути виготовлені за допомогою традиційних процедур, модифікуючи протез для рентгенівського сканування або за допомогою технологій комп'ютерного дизайну/комп'ютерного виробництва (CAD/CAM) (фрезерування/стереолітографія або 3D-друк).
Хірургічні направляючі можуть спиратися на зуби, кістки або слизові оболонки, з або без стабілізаційних штифтів. Деякі системи направляючих використовують для кожного пацієнта різні направляючі з різними розмірами кілець, тоді як інші використовують лише направляючі без кілець. Додаткова диференціація надається за модальністю закручування імплантату після підготовки місця для імпланта: деякі системи забезпечують повністю кероване введення імплантату через ту ж модель свердління; інші методи можуть вимагати ручного введення імплантату після зняття хірургічної шини.
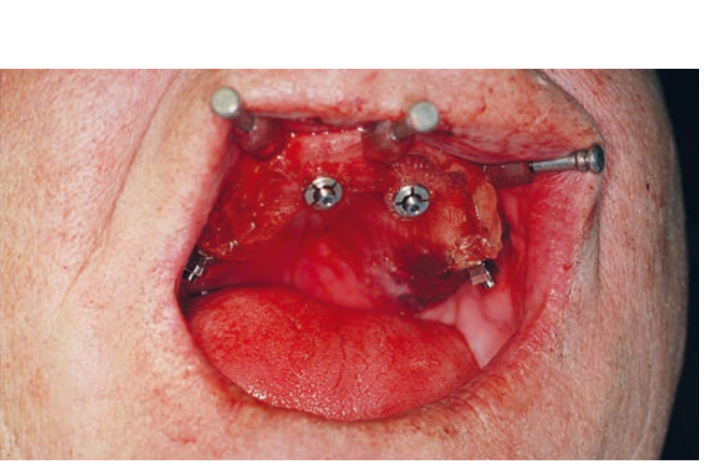


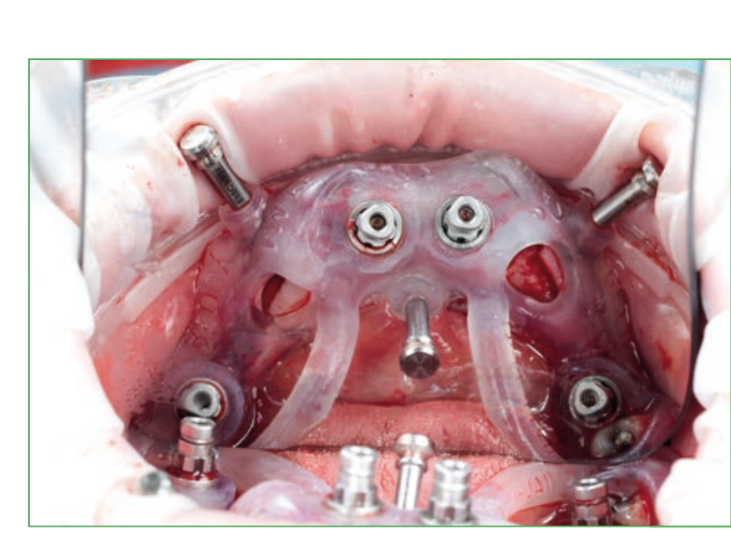





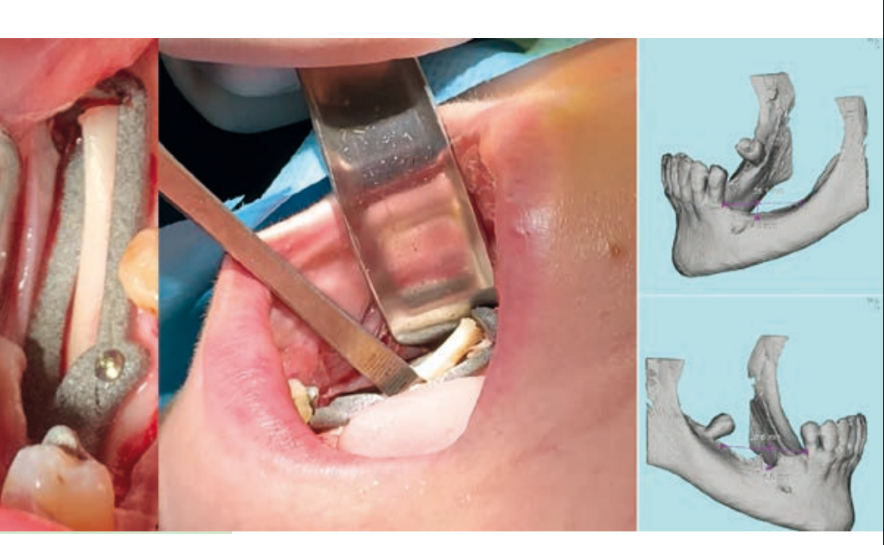
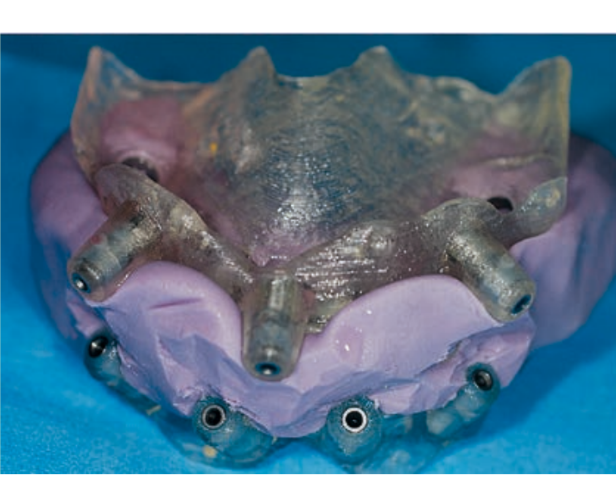
Направлене встановлення імплантатів часто дозволяє проводити малотравматичні операції без необхідності піднімати хірургічний клапоть. Іншою перевагою направлених технік є наявність на момент операції заздалегідь виготовленого фіксованого протеза, основаного на запланованому положенні імплантатів, здатного з'єднувати нововстановлені імплантати та легко отримувати функціональне та естетичне миттєве навантаження.





Проте, навіть для імплантованої хірургії з керуванням існують недоліки, які слід чітко оцінити. По-перше, як і всі нові методи, цей тип хірургії вимагає періоду навчання для стоматолога, техніка та загалом для всієї стоматологічної команди. Час, необхідний для планування передопераційного керування імплантом, безумовно, більший у порівнянні з традиційними протоколами. Економічні аспекти також повинні бути оцінені щодо навчання, інструментування, виготовлення хірургічних напрямних. Будь-яка помилка в отриманні 3D-зображення або внутрішньоротового сканування призводить до спотворення у виготовленні напрямної, що призведе до помилки при встановленні імпланта та тимчасової протези.
З розвитком напрямних для встановлення імплантів з'явилося багато інших напрямних, таких як напрямні для гінгівектомії та коронального подовження, напрямні для зменшення кістки, напрямні для видалення кісткових або гінгівальних трансплантатів або напрямні для встановлення тимчасової протези.
Хоча середнє відхилення при керованій хірургії становить близько 3,5 градусів, це завжди краще, ніж хірургія, виконана вручну, що підтверджує, що керована хірургія є перспективною, малотравматичною технікою, яка покращує кінцевий результат позиції імплантату та протезування.