Протезні хірургічні шаблони та підготовка місця для зубних імплантатів: in vitro дослідження
Машинний переклад
Оригінальна стаття написана мовою EN (посилання для прочитання) .
Анотація
Численні типи хірургічних направляючих для протезування, з металевими рукавами та без них, виявилися корисними в клінічних дослідженнях. Метою цього in vitro дослідження було порівняти час, необхідний для завершення хірургічної процедури, з двома по-різному спроектованими хірургічними протезними шаблонами. Було підготовлено та надруковано десять ідентичних прототипів моделей щелепи на основі CBCT та оптичного сканування частково беззубого пацієнта з відсутніми зубами під номерами 37, 46 та 47. П’ять з цих моделей використовувалися для підготовки місця для імпланта з хірургічною направляючою без металевих рукавів та спеціальним хірургічним набором, а інші п’ять моделей використовувалися для тієї ж процедури, виконаної з хірургічною направляючою з металевими рукавами та спеціальним хірургічним набором. Час підготовки місця для імпланта вимірювався та фіксувався. Статистичний аналіз проводився за допомогою t-тесту Ст’юдента для незалежних вибірок. Різниці між групами виявилися статистично значущими (t = −9.94; df = 28; p = 0.0000) з нижчим значенням на користь хірургічних шаблонів без металевих рукавів. Різні типи хірургічних направляючих для протезування, з металевими рукавами або без них, здаються важливим фактором, який може суттєво вплинути на час підготовки місця для імпланта і, отже, на загальну хірургічну процедуру.
Вступ
Імплантологія - це галузь стоматології, яка має на меті відновлення втрачених зубів шляхом вставлення алопластичних гвинтів (з різних матеріалів) у структуру кістки (зубні імпланти). В основному, імплантологія є реабілітаційною процедурою, спрямованою на тих, хто втратив свої природні зуби. Штучні зуби призначені для заміни реальних зубів, які відсутні як з естетичної точки зору, так і з точки зору жувальної функції.
Сучасні техніки імплантології дозволяють здійснити постійну реабілітацію жування і, в останні роки, спрямовані на покращення естетичних результатів. Прогнозованість цих реабілітацій стає все вищою, особливо завдяки впровадженню цифрової стоматології. Завдяки появі цифрових технологій, стало можливим програмувати, діагностувати та планувати лікування з повністю цифровим робочим процесом.
Направлена імплантологія - це сучасна техніка позиціонування зубних імплантів у пацієнтів, які страждають від адентії (відсутності одного або кількох зубів) або які перенесли видалення зуба. Використовуючи програмне забезпечення, ротова порожнина пацієнта сканується, створюючи 3D-модель, на основі якої стоматолог може спланувати операцію та попередньо її переглянути. Головною перевагою цієї техніки є те, що вона дозволяє провести операцію точно так, як було заплановано на комп'ютері, тим самим покращуючи механічні характеристики і, отже, прогнозованість. Першим кроком є проведення усного обстеження пацієнта; ротова порожнина сканується за допомогою 3D КТ, щоб зібрати цифрову модель зубного ряду. Радіографічне обстеження фіксує важливу інформацію, таку як положення чутливих нервів, положення верхньощелепної пазухи та інші анатомічні орієнтири.
Цю симуляцію потім надсилають до спеціалізованих центрів, які створюють "хірургічний посібник", що використовується для проведення операції без впливу на ясна; гвинт розміщується всередині тканин і, відповідно, видимої зубної коронки. Завдяки точному плануванню, яке відбувається перед втручанням, процедура завершується швидко. Нещодавня наукова література, включаючи in vitro дослідження, систематичні огляди, багатопрофільні клінічні випробування та рандомізовані контрольовані випробування, приводить до висновку, що використання індивідуальних, CAD/CAM (комп'ютерне проектування/комп'ютерне виробництво) хірургічних посібників слід вважати золотим стандартом для досягнення високої точності імплантації відповідно до плану лікування, орієнтованого на протезування. Стереолітографічні хірургічні посібники також є одним з найпопулярніших застосувань 3D-друку в оральній та щелепно-лицевій хірургії. Д’Суза поділив імплантаційні посібники на (a) необмежуючі, (b) частково обмежуючі та (c) повністю обмежуючі дизайни, відповідно до кількості хірургічних обмежень, які пропонуються шаблонами хірургічного посібника. Серед них група повністю обмежуючого дизайну є найсучаснішою та найточнішою, і її можна поділити на три підгрупи: (c1) посібники з основними металевими рукавами, (c2) посібники без металевих рукавів, лише з пластику, та (c3) відкриті пластикові або металеві посібники. Більшість досліджень зосереджено на точності керованої хірургії з використанням різних дизайнів шаблонів, приходячи до висновку, що хірургічні шаблони без металевих рукавів є більш точними, ніж ті, де металеві рукави прикріплені. Крім того, деякі дослідження також повідомляли, що час хірургії, витрачений на кероване імплантаційне розміщення, є коротшим у порівнянні з вільним підходом. З іншого боку, інші дослідження показали кілька обмежень керованого підходу. Однак немає досліджень, які порівнюють час хірургії з різними дизайнами хірургічних шаблонів.
Метою цього in vitro дослідження було порівняти загальний час, витрачений на підготовку імплантаційних місць, використовуючи два різні хірургічні шаблони та хірургічні набори, призначені для однакових конічних імплантів (TSIII, Osstem Implant, Сеул, Південна Корея ®), але з різними дизайнами шаблонів: пластиковий шаблон з металевими втулками та без них. Нульова гіпотеза полягала в тому, що немає різниці в часі між двома різними протоколами.
Результати
Всього було надруковано 10 хірургічних шаблонів, які потім були використані для даного дослідження. Моделі були випадковим чином розділені на дві групи по п’ять моделей у кожній. Три імпланти діаметром 4,0 мм і довжиною 10 мм були заплановані на позиціях 37, 46 та 47. Всього було підготовлено 30 імплантаційних місць: 15 місць у п’яти моделях, використовуючи набір One Guide Kit ® (Osstem Implant, Сеул, Південна Корея 2016 ®) (OGK), і 15 місць в інших п’яти моделях, використовуючи набір Guide Kit Taper ® (Osstem Implant, Сеул, Південна Корея 2010 ®) (GKT).
Таблиця 1 представляє результати статистичного аналізу. Середній час у тестовій групі (без металевих втулок, OGK) становив 99.63 ± 31.91 с, а в контрольній групі (з металевими втулками, і GKT) становив 207.81 ± 27.53 с.
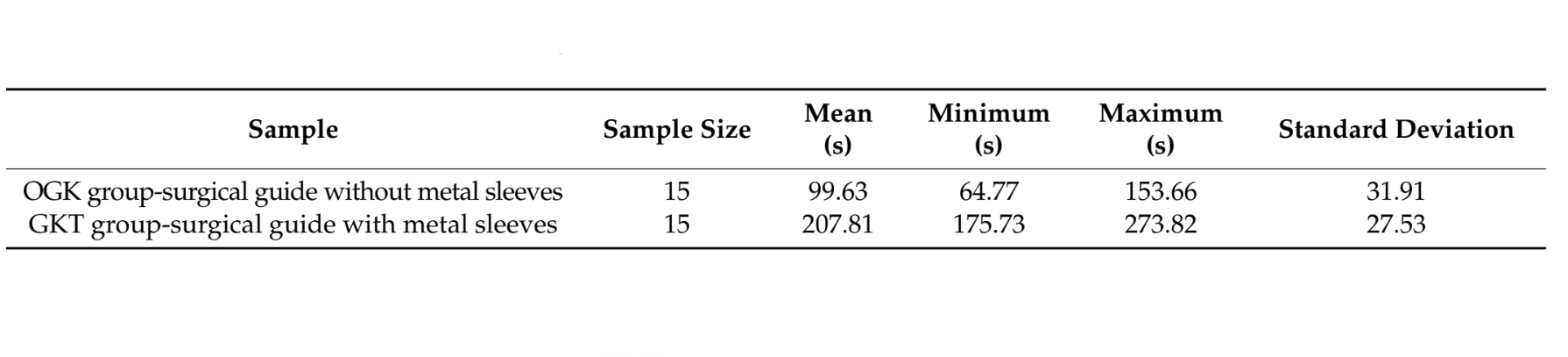
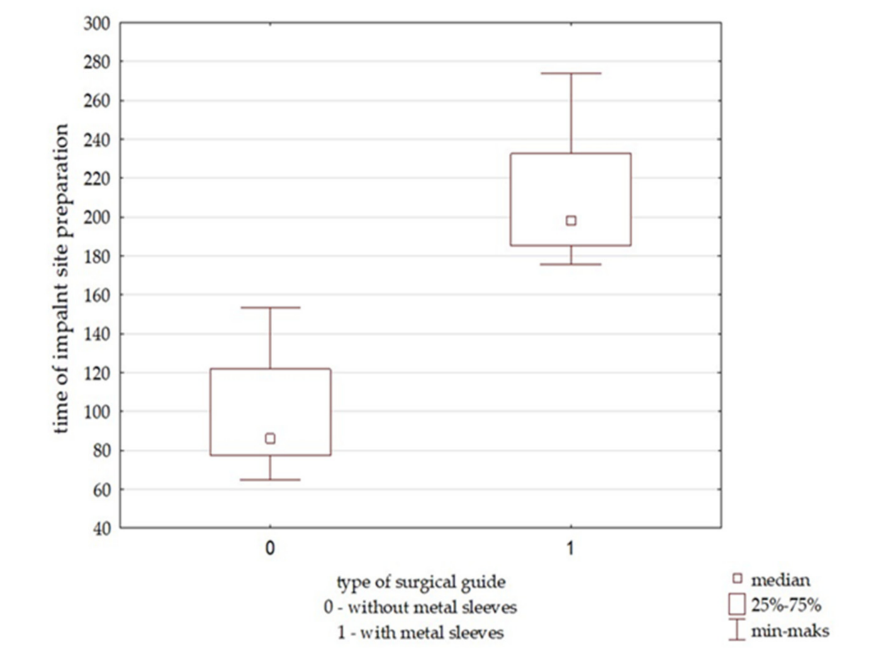
Статистично значуща різниця між тестовою та контрольною групами була перевірена за допомогою статистичного t-тесту Ст'юдента. t-значення тесту становило −9.94 з 28 ступенями свободи. p-значення було нижче 0.05 (p = 0.000), що доводить, що час підготовки був статистично значущо нижчим у групі OGK, ніж у групі GKT. Рисунок 1 показує різниці в термінах часу підготовки місця імплантації в обох групах.
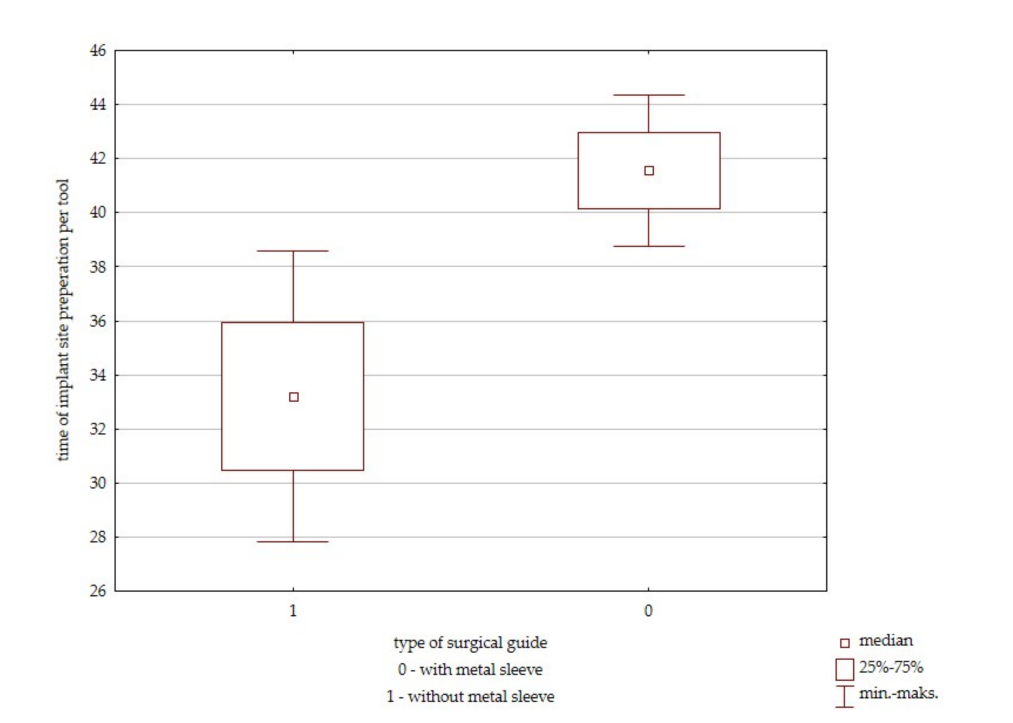
Різницю в часі на інструмент для кожної групи також перевірили за допомогою t-тесту Ст'юдента. Середній час використання кожного інструмента був розрахований в обох групах, і дані були проаналізовані. t-значення тесту становило −2.70 з 28 ступенями свободи. Значення p Рафаеля Дельгадо-Руїза було нижче 0.05 (p= 0.011), що доводить, що час підготовки на інструмент також був статистично значно нижчим у групі OGK, ніж у групі GKT. Порівняння представлено у вигляді боксплотів (Рисунок 2).
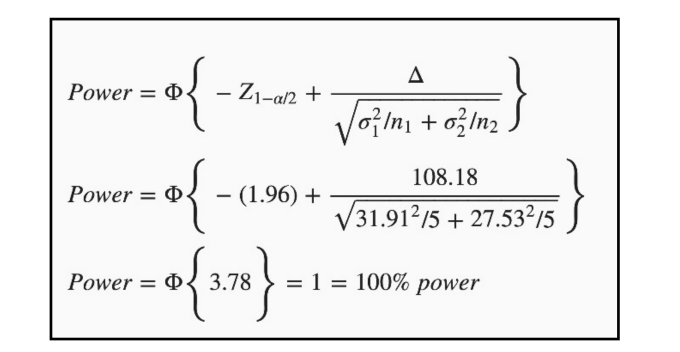
Аналіз боксплотів продемонстрував статистично значущу різницю між групами. Було проведено пост-хок розрахунок потужності для оцінки статистичної потужності дослідження. Враховуючи середні значення кінцевих точок та кількість учасників, при альфа, встановленому на 0.05, пост-хок потужність становила 100% (Рисунок 3).
Обговорення
Це дослідження зосереджено на часі, необхідному для підготовки місця для імплантації за допомогою двох різних хірургічних шаблонів та відповідних, спеціалізованих хірургічних наборів. У рамках даного дослідження кожне місце для імплантації було підготовлено в однакових умовах (37, 46, 47), так що лише відмінності в хірургічних інструментах могли вплинути на час підготовки місця. Результати показали, що підготовка місця для імплантації була значно коротшою за використання хірургічного шаблону без металевих втулок та OGK. На цій основі нульова гіпотеза про відсутність різниці була відхилена. Незважаючи на малий розмір вибірки та in vitro характер даного дослідження, стандартне відхилення було подібним в обох групах, що доводить, що внутрішньогрупові відмінності були схожими. Цей фактор сприяв дуже високій пост хоку потужності даного дослідження. Дослідники виявили, що конструкція конусних свердел з гладкою направляючою частиною в OGK дозволяє використовувати кожен діаметр свердла, а також різні компоненти, включені в набір, з тією ж діаметральною частиною, що відстежується, наданою надрукованим пластиковим шаблоном. Свердла GKT є циліндричними, деякі з них мають гладку направляючу частину, що підходить до основної металевої втулки, а інші - ні. Це викликає необхідність використання додаткових знімних металевих втулок для зменшення діаметра основної направляючої втулки до кожного конкретного свердла в послідовності. Це створює потребу у використанні більшої кількості інструментів (свердло + зменшувальна втулка) при роботі з GKT.
У даному дослідженні сталася одна помилка при виборі відповідних інструментів з набору GKT, тоді як помилок з OGK не було.
Простий протокол підготовки місця для імпланта з дизайном без рукавів і OGK призводить до нижчого ризику помилок оператора, що може підвищити безпеку хірургічних процедур. Зменшена кількість хірургічних інструментів не лише скорочує час під час свердління під час операції, але також може знизити ризик помилок оператора або асистента і, таким чином, загальний ризик операції.
Casetta та ін. виявили, що зазор між свердлами та металевими рукавами, вбудованими в пластикові шаблони, або навіть зазор між свердлами та рукавами зменшення може призвести до неточностей під час операції. Точність двох дизайнів і наборів хірургічних шаблонів (OGK та GKT) була порівняна в RCT з 100 імплантами. У цьому дослідженні ми порівняли лише час підготовки місця для імпланта, використовуючи точно той же набір і дизайн шаблону. Усього було встановлено 41 імплант з GKT та металевими рукавами, вбудованими в пластикову рамку шаблону, тоді як 49 імплантів було встановлено з OGK лише з пластиковою рамкою шаблону. Хірургічні шаблони без металевих рукавів виявилися більш точними з точки зору вертикального плану та кута в порівнянні з традиційним шаблоном з металевими рукавами. Порівнюючи вимоги до підготовки обох наборів, дослідники помітили, що вбудування металевого рукава в 3D-друковану рамку вимагало на 1 мм більше міжзубного простору для дизайну шаблону. Хоча це не вплинуло на наш експеримент, запланований на молярних ділянках, це може мати клінічні обмеження, коли доступний обмежений міжзубний простір, наприклад, премоляри або нижні різці.
На додаток до більших вимог до простору, Кассетта та ін. виявили, що розміщення заводської металевої втулки в шаблоні може викликати помилки під час виготовлення хірургічного направляючого, і, як вже згадувалося, зазори між основною втулкою та зменшеною втулкою для конкретного свердла, а також між зменшеною втулкою та свердлом можуть призвести до неточностей під час хірургії. Іншою проблемою є додаткові витрати на спеціалізовані металеві втулки, а також лабораторні роботи для точного розміщення та з'єднання їх у рамі направляючого. Усі ці фактори збільшують вартість лікування, особливо у випадках, коли планується кілька імплантатів. Тому, тривимірно надруковані хірургічні направляючі з вбудованими неметалевими втулками меншого діаметра були запропоновані Шнайдером та ін. для зменшення бічного руху свердла та толерантності інструментів, а також вартості. Крім того, коли використовується тільки пластиковий 3D-друкований каркас направляючого як хірургічний шаблон, пристрій і технологія 3D-друку, що використовуються для виготовлення, також можуть бути ключовими моментами для точності. Ще однією перевагою 3D-друкованого шаблону без металевої втулки є можливість спроектувати щічний отвір для полегшення свердління в задній області (обмежене відкриття рота). Проте, так звані бокові відкриті втулки виявилися менш точними в порівнянні з закритими пластиковими втулками в надрукованих шаблонах, але більш точними в порівнянні з процедурами імплантації вільною рукою. З іншого боку, бокові відкриті втулки без металевих елементів можуть бути єдиним можливим дизайном у деяких клінічних ситуаціях через анатомічні обмеження, включаючи відкриття рота та міжзубний простір.
Коломбо та ін., у критичному огляді, основаному на рандомізованих контрольованих випробуваннях щодо клінічних застосувань та ефективності керованої імплантації, дійшли висновку, що під час керованих імплантацій обговорюються скорочення часу операції та післяопераційного болю. Важливо зазначити, що дослідження базувалося на двох РКВ, і в обох випадках використовувалися імплантаційні направляючі, стабілізовані кісткою або м'якими тканинами, що означає, що пацієнти проходили значні хірургічні втручання. У іншому РКВ було виявлено вищий післяопераційний біль і набряк у ділянках, які лікувалися вручну, порівняно з тими, що мали керований підхід. Різниця в післяопераційному досвіді пацієнтів у цих дослідженнях може бути обумовлена обсягом самої операції. Загалом, хірургія, де піднімається великий клапоть і направляюча розміщується на поверхні кістки, є більш травматичною, ніж міні-клапоть або безклапанна керована імплантація одиничних або множинних імплантів з направляючою, що підтримується зубом. Таким чином, для пацієнта може не бути значної різниці, якщо велике хірургічне втручання проводиться під керівництвом або вручну, тоді як можуть бути значні відмінності для менш обширної хірургії. Крім того, точність керованої імплантації варіює в залежності від того, чи є це простим або складним хірургічним втручанням. Той же час, необхідний для точної стабілізації направляючої з кістковими якорями під час великої хірургії, може зникнути при порівнянні часу, необхідного для проведення подібної операції вручну без цього процесу. Проте, час основної операції та підготовки ділянок для імплантації може бути коротшим при керованому підході або навіть якщо використовуються прості направляючі пристрої. Аналізуючи фактори ризику післяопераційних ускладнень після оральної хірургії, Сігейші та ін. виявили, що тривалість операції є значним фактором ризику у пацієнтів, які проходили оральну хірургію.
Враховуючи, що різні хірургічні втручання вимагають різного часу для підготовки операційного поля, анестезії, відображення клаптів та встановлення і фіксації шаблонів, керований підхід забезпечує підвищену точність під час імплантаційних процедур.
У цього дослідження були обмеження. Порівняння точності між протестованими направляючими та наборами було неможливим для виконання в рамках in vitro випробування. Це обмеження було зумовлене матеріальними властивостями моделі дослідження. Оскільки місце імплантації, виконане в жорсткій пластиковій моделі відповідно до рекомендацій виробника для твердих кісток, має менший діаметр, ніж різьба імпланта, і оскільки опір поліаміду дуже високий, неможливо встановити імплант з відповідним крутним моментом. Під час встановлення імпланта застосований крутний момент призвів до негайного руйнування дизайну передачі імпланта, який повинен використовуватися під час керованого встановлення імпланта. Тому, щоб точно порівняти два ідентичні дизайни шаблонів і хірургічні набори в RCT, було вирішено зосередитися лише на порівнянні часу в рамках цього in vitro дослідження. Іншим обмеженням є те, що час свердління в рідній кістці може відрізнятися від свердління в пластикових моделях. Однак, залежно від типу кістки або її твердості, процедури свердління в різних місцях або у різних пацієнтів можуть займати різну кількість часу. Практично певно, що абсолютна кількість часу, необхідна для підготовки місця в кістці, може відрізнятися від такої в пластикових моделях. Тим не менш, результати цього дослідження свідчать про те, що використання безсувальдного направляючого з OGK може значно зменшити час підготовки місця для імплантації в порівнянні з направляючим з рукавом та спеціалізованим GKT. Це може бути особливо важливим, якщо під час хірургії встановлюється кілька імплантів.
На додаток до всіх внутрішньохірургічних аспектів імплантаційних терапій на основі шаблонів, цим процедурам передує ретельний діагностичний процес. Етап планування з використанням зображень CBCT, сканів ротових тканин та візуалізації фінального плану відновлення може бути корисним під час комунікації між пацієнтом і лікарем. Розуміння плану лікування та всіх його переваг, включаючи нижчу інвазивність, менший біль, кращу точність і, як зазначено в цьому дослідженні, коротший час операції з цифрово підтримуваною імплантаційною терапією, може бути корисним для зменшення страху та тривоги серед пацієнтів.
Матеріали та методи
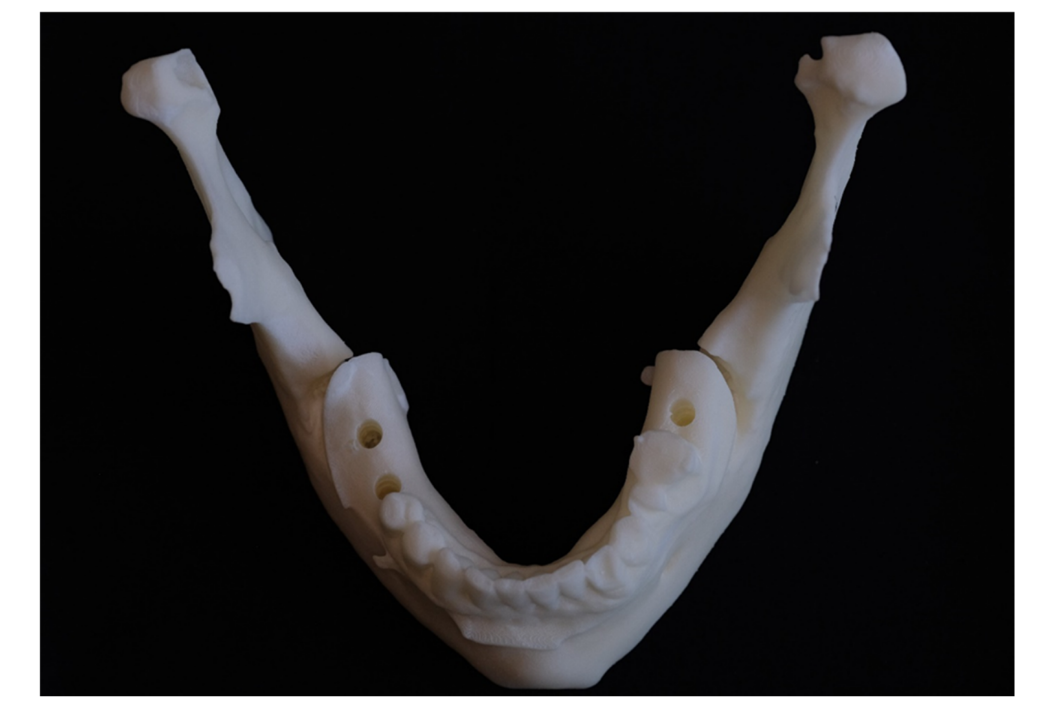
Моделі для експерименту були створені на основі раніше зібраних даних від 56-річного частково беззубого чоловіка, у якого відсутні зуби під номерами 37, 46 та 47. Дані DICOM (Цифрова візуалізація та зв'язок у медицині) пацієнта були отримані з попереднього сканування CBCT (конусно-променева комп'ютерна томографія, NewTom 5G XL, CEFLA s.c., Імола, Італія). Збережена гіпсова модель, що представляє анатомію твердих і м'яких тканин, була оцифрована за допомогою лабораторного сканера (Ceramill Map 600, Amann Girrbach AG, Коблах, Австрія), а дані були імпортовані в програмне забезпечення DDS-Pro (JST, Ченстохова, Польща). Оцифрована модель була збережена у вигляді файлу STL (Стандартна мова триангуляції), а потім надрукована за допомогою технології SLS (Селективне лазерне спікання) та поліамідного порошкового матеріалу (SL01, Sondasys, Огродзенець, Польща). Зовнішній друкарський центр підготував усі моделі (Sondasys, Огродзенець, Польща). На малюнку 4 показана 3D-друкована модель.
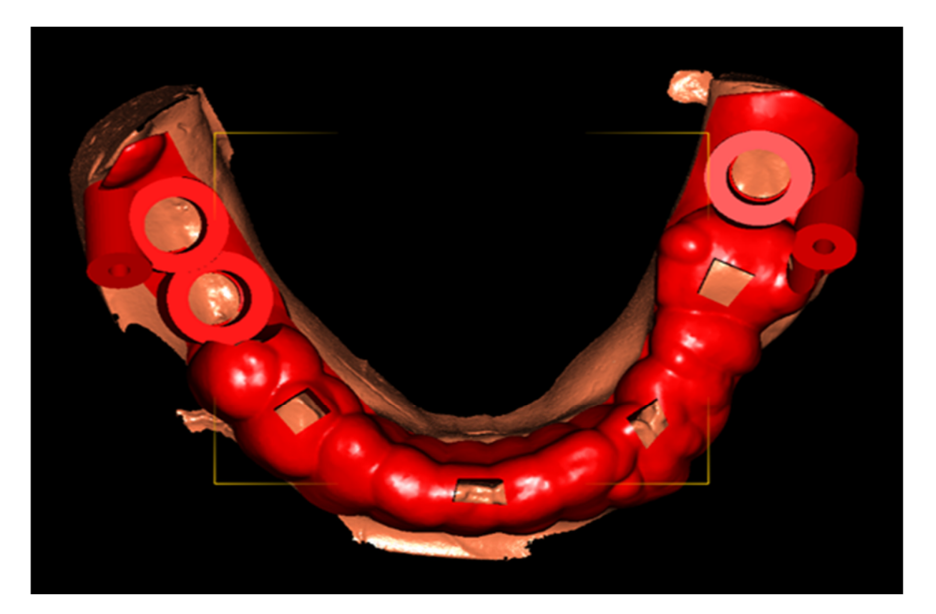
Програмне забезпечення DDS-Pro було використано для віртуального планування імплантатів діаметром 4,0 мм і довжиною 10 мм, у правильних, протезно обґрунтованих позиціях. Два типи хірургічних направляючих (Рисунок 5) були спроектовані відповідно до рекомендацій виробника, щоб використовуватися з двома різними хірургічними наборами для розміщення тих самих конічних імплантатів (TSIII SA Implants, Osstem Implants, Сеул, Південна Корея). Хірургічний шаблон без металевих втулок був спроектований для використання з новим набором OneGuide (Тестова група, OGK, Osstem Implants), тоді як другий хірургічний шаблон був підготовлений для включення металевих втулок, призначених для імплантатів діаметром 4,0 мм (Зелена металева втулка, Osstem Implants) з набором Guide Kit Taper (Контрольна група, GKT, Osstem Implants).
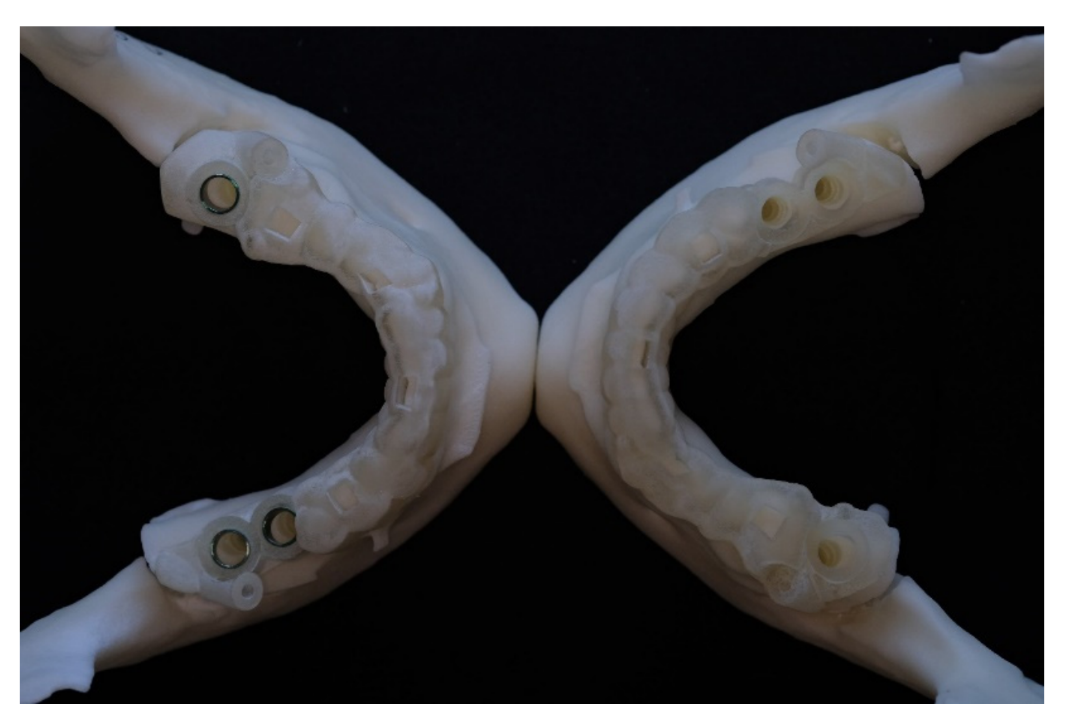
Направляючі були спроектовані в однаковій формі, так що єдиною різницею між ними був діаметр отворів, підготовлених відповідно до вимог різних хірургічних наборів (Рисунки 6 і 7). GKT вимагав на 1 мм більше для інтеграції та з'єднання спеціалізованої металевої втулки в хірургічну направляючу. Обидва шаблони були 3D-друковані в зовнішньому центрі друку (Natrodent, Łódż, Польща) з використанням технології мульти-струменевого друку (MP3000, 3D Systems, матеріал: підтримки S100, направляюча MP100, 3D Systems, Rock Hill, SC, США). Після друку хірургічні шаблони були поміщені в морозильник на кілька хвилин. Це дозволило легко видалити друковані вироби з платформи принтера. Після того, як хірургічні шаблони були видалені з платформи, матеріал підтримки був видалений у конвекційній печі при 70°C протягом 30 хвилин. Після цього будь-який залишковий матеріал підтримки був видалений за допомогою паперової серветки та ультразвукової ванни при приблизно 65°C (5 хв). Нарешті, хірургічні шаблони були промиті теплою мильною водою та висушені паперовою серветкою та сухим стисненим повітрям. Після перевірки хірургічні шаблони були відправлені на тест in vitro.

Усі моделі були випадковим чином поділені на дві групи. Перша група передбачала використання направляючої з металевими рукавами та GKT, тоді як у другій групі хірургічні шаблони виготовлялися без металевих рукавів, щоб використовуватися з OGK.
Три імплантаційні місця були підготовлені в кожній дослідницькій моделі відповідно до віртуального плану та інструкцій виробника. Процедури свердління виконувалися одним і тим же експертним оператором з обома хірургічними наборами (Ł.Z.), використовуючи хірургічний пристрій Implantmed (W&H Dentalwerk Bürmoos GmbH, Bürmoos, Австрія) зі швидкістю 1200 об/хв та максимальним крутним моментом під холодним сольовим зрошенням.
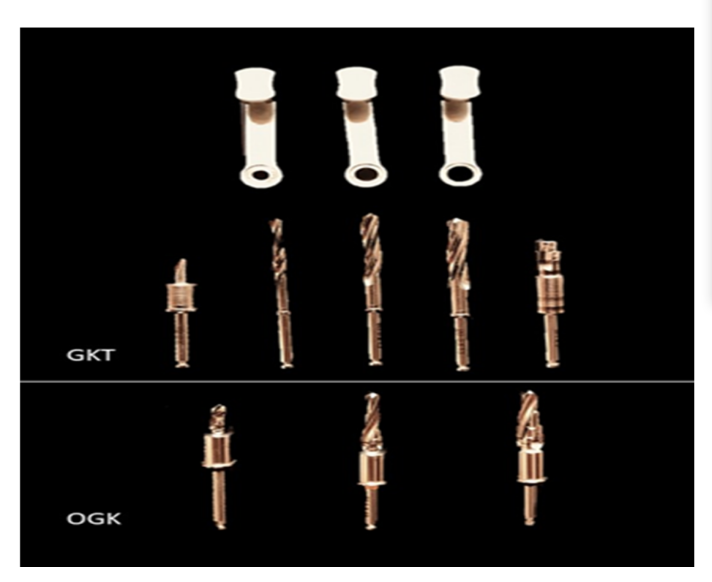
Вимірювання часу проводилися за допомогою цифрового секундоміра (iPhone 8, Apple Inc., Купертіно, Каліфорнія, США). Часовий період починався після розміщення хірургічного шаблону і закінчувався після видалення останнього свердла. Вимірювання часу фіксувалися в хвилинах, секундах та сотих частках секунди, і вони були зафіксовані в програмному забезпеченні Excel (Microsoft Corporation, Редмонд, Вашингтон, США) тим же оцінювачем результатів (M.C.). Виміряні часи включали час, необхідний для зміни свердел, і вони фіксувалися незалежно для кожного окремого імплантаційного місця. Усі інструменти зберігалися в наборі та перевірялися перед кожною процедурою підготовки місця. Протокол свердління, необхідний для підготовки імплантаційного місця (наприклад, діаметр 4,0 мм та довжина 10 мм), був таким, як рекомендує виробник. Проте він не був однаковим у обох хірургічних наборах. Для хірургічних направляючих без рукавів (OGK) використовувалися лише три хірургічні свердла, тоді як для набору, що вимагав металевих рукавів (GKT), потрібно було п’ять хірургічних свердел і три металеві редукції (ключі) для підготовки місця (Рисунок 8).
Порівняння часу підготовки було проаналізовано за допомогою t-тесту Ст'юдента для незалежних вибірок (Statistica, StatSoft Polska, Краків, Польща). Значення p < 0.05 вважалося статистично значущим. Результати представлені як середнє ± стандартне відхилення, а класичні 95% довірчі інтервали були розраховані.
Висновки
Беручи до уваги результати цього дослідження з усіма його обмеженнями, ми можемо зробити висновок, що використання 3D-друкованого пластикового гіда без металевих елементів вимагає менше часу для підготовки місця для імпланта в порівнянні з використанням пластикового гіда з вбудованою металевою втулкою та спеціальним хірургічним набором GKT. Металеві втулки можна вважати безпечним допоміжним засобом для оральної хірургії. Таким чином, анатомічні структури не пошкоджуються їх застосуванням. Скорочення часу операції при використанні 3D-друкованого пластикового гіда стає ще одним клінічно цінним фактором на додаток до вищої точності та нижчих витрат на виробництво в порівнянні з традиційними шаблонами з металевими втулками. З 1992 року, коли розпочалася ера цифрової імплантології, технологія зазнала багатьох змін. Завдяки покращенням технології 3D-друку та змінам у дизайні направляючих свердел (від циліндричних, які вимагали металевих втулок, вбудованих у шаблон для захисту пластикової частини гіда під час свердління, до конічних свердел з єдиною гладкою направляючою частиною), ми можемо спостерігати еволюцію цифрової імплантології. Нижча вартість, вища точність і коротший час операції є найважливішими факторами, які цінують як клініцисти, так і пацієнти.
Łukasz Zadrożny, Marta Czajkowska, Marco Tallarico, Leopold Wagner, Jarosław Markowski, Eitan Mijiritsky та Marco Cicciù
Посилання
- Mumoli, N.; Busoni, A.; Cei, M. Проковтнута зубна протеза. Lancet 2009, 373, 1890.
- Bjertness, E.; Hansen, B.F.; Berseth, G.; Gronnesby, J.K. Оральна гігієна та пародонтит у молодих людей. Lancet 1993, 342, 1170–1171.
- Bramanti, E.; Norcia, A.; Cicciù, M.; Matacena, G.; Cervino, G.; Troiano, G.; Zhurakivska, K.; Laino, L. Імплантація зубів після видалення в естетичній зоні, техніка захисту лунки проти традиційного протоколу. J. Craniofacial Surg. 2018, 29, 1037–1041.
- Lavorgna, L.; Cervino, G.; Fiorillo, L.; Di Leo, G.; Troiano, G.; Ortensi, M.; Galantucci, L.; Cicciù, M. Надійність віртуального протезування, реалізованого за допомогою 2D та 3D фотозйомки: експериментальне дослідження точності різних цифрових систем. Int. J. Environ. Res. Public Health 2019, 16, 5139.
- Ortiz, C.; Boyce, M.C. Наука про матеріали. Біовдохновлені структурні матеріали. Science 2008, 319, 1053–1054.
- Laino, L.; Cicciù, M.; Fiorillo, L.; Crimi, S.; Bianchi, A.; Amoroso, G.; Monte, I.P.; Herford, A.S.; Cervino, G. Хірургічний ризик у пацієнтів з коагулопатіями: рекомендації для гемофілічних пацієнтів для оро-щелепно-лицевої хірургії. Int. J. Environ. Res. Public Health 2019, 16, 1386.
- Cicciù, M.; Fiorillo, L.; D’Amico, C.; Gambino, D.; Amantia, E.M.; Laino, L.; Crimi, S.; Campagna, P.; Bianchi, A.; Herford, A.S.; та ін. 3D цифрові системи зняття відбитків у порівнянні з традиційними техніками в стоматології: систематичний огляд останніх даних. Materials 2020, 13, 1982.
- Scrascia, R.; Fiorillo, L.; Gaita, V.; Secondo, L.; Nicita, F.; Cervino, G. Протез на імплантатах для реабілітації беззубих пацієнтів. Від тимчасового протезу до остаточного з новим протоколом: звіт про один випадок. Prosthesis 2020, 2, 10–24.
- Urban, I.; Caplanis, N.; Lozada, J.L. Одночасна вертикальна спрямована регенерація кістки та спрямована регенерація тканин у задній частині верхньої щелепи з використанням рекомбінантного людського фактора росту, отриманого з тромбоцитів: звіт про випадок. J. Oral Implantol. 2009, 35, 251–256.
- Cicciù, M.; Cervino, G.; Terranova, A.; Risitano, G.; Raffaele, M.; Cucinotta, F.; Santonocito, D.; Fiorillo, L. Протезні та механічні параметри лицьової кістки під навантаженням різних форм зубних імплантатів: параметричне дослідження. Prosthesis 2019, 1, 41–53.
- D’Amico, C.; Bocchieri, S.; Sambataro, S.; Surace, G.; Stumpo, C.; Fiorillo, L. Розгляди навантаження прикусів у фіксованих реставраціях на імплантатах. Prosthesis 2020, 2, 252–265.
- Tallarico, M.; Czajkowska, M.; Cicciù, M.; Giardina, F.; Minciarelli, A.; Zadroz˙ny, Ł.; Park, C.J.; Meloni, S.M. Точність хірургічних шаблонів з металевими та без металевих рукавів у випадку часткових реставрацій: систематичний огляд. J. Dent. 2021, 115, 103852.
- Park, J.Y.; Song, Y.W.; Park, S.H.; Kim, J.H.; Park, J.M.; Lee, J.S. Клінічні фактори, що впливають на позиціонування імплантатів за допомогою спрямованої хірургії з використанням шаблону без металевого рукава в частково беззубому гребені: множинний регресійний аналіз перспективної когортної групи. Clin. Oral Implant. Res. 2020, 31, 1187–1198.
- Zadrożny, Ł.; Czajkowska, M.; Mijiritsky, E.; Wagner, L. Повторюваність імплантацій без допомоги рук з універсальними пластиковими рукавами - in vitro дослідження. Int. J. Environ. Res. Public Health 2020, 17, 4453.
- Tallarico, M.; Martinolli, M.; Kim, Y.; Cocchi, F.; Meloni, S.M.; Alushi, A.; Xhanari, E. Точність комп'ютерно-асистованої імплантації з використанням двох різних хірургічних шаблонів, розроблених з металевими або без металевих рукавів: рандомізоване контрольоване дослідження. Dent. J. 2019, 7, 41.
- Marlière, D.A.A.; Demètrio, M.S.; Picinini, L.S.; Oliveira, R.G.; Netto, H. Точність комп'ютерно-асистованої хірургії для імплантації зубів у повністю беззубих пацієнтів: систематичний огляд. Eur. J. Dent. 2018, 12, 153–160.
- Tallarico, M.; Caneva, M.; Baldini, N.; Gatti, F.; Duvina, M.; Billi, M.; Iannello, G.; Piacentini, G.; Meloni, S.M.; Cicciù, M. Реабілітація пацієнтів з одиничним, частковим та повним беззубістю з цементованими або гвинтовими фіксованими зубними протезами: Перша конференція консенсусу Центру досліджень та освіти з імплантації зубів Osstem 2017. Eur. J. Dent. 2018, 12, 617–626.
- Tahmaseb, A.; Wu, V.; Wismeijer, D.; Coucke, W.; Evans, C. Точність статичної комп'ютерно-асистованої імплантації: систематичний огляд та мета-аналіз. Clin. Oral Implant. Res. 2018, 29 (Suppl. 16), 416–435.
- Van de Wiele, G.; Teughels, W.; Vercruyssen, M.; Coucke, W.; Temmerman, A.; Quirynen, M. Точність спрямованої хірургії за допомогою мукозно-підтримуваних стереолітографічних хірургічних шаблонів у руках хірургів з невеликим досвідом. Clin. Oral. Implant. Res. 2015, 26, 1489–1494.
- Van Assche, N.; Vercruyssen, M.; Coucke, W.; Teughels, W.; Jacobs, R.; Quirynen, M. Точність комп'ютерно-асистованого розміщення імплантатів. Clin. Oral Implant. Res. 2012, 23 (Suppl. 6), 112–123.
- Javaid, M.; Haleem, A. Поточний стан та застосування адитивного виробництва в стоматології: огляд літератури. J. Oral Biol. Craniofac. Res. 2019, 9, 179–185.
- Louvrier, A.; Marty, P.; Barrabé, A.; Euvrard, E.; Chatelain, B.; Weber, E.; Meyer, C. Наскільки корисний 3D-друк у щелепно-лицевій хірургії? J. Stomatol. Oral Maxillofac. Surg. 2017, 118, 206–212.
- Tack, P.; Victor, J.; Gemmel, P.; Annemans, L. Техніки 3D-друку в медичній практиці: систематичний огляд літератури. Biomed. Eng. Online 2016, 15, 115.
- Di Giacomo, G.; Silva, J.; Martines, R.; Ajzen, S. Комп'ютерно спроектований хірургічний шаблон для селективного лазерного спікання та імплантатів з миттєвим навантаженням з остаточними протезами у беззубого пацієнта: попередній метод. Eur. J. Dent. 2014, 8, 100–106.
- D’Souza, K.M.; Aras, M.A. Типи хірургічних шаблонів для імплантації в стоматології: огляд. J. Oral Implantol. 2012, 38, 643–652.