
Новий цифровий робочий процес для повної реабілітації зубів
Машинний переклад
Оригінальна стаття написана мовою EN (посилання для прочитання) .
Вступ
Сучасна стоматологія переживає технологічну революцію, зумовлену інтеграцією передових цифрових інструментів у діагностику, планування та лікування. Серед них комп'ютерно-керована імплантологія стала основою, особливо в складних процедурах, таких як естетика та реабілітація з повною аркою. Цей підхід не лише підвищує хірургічну точність, але й зменшує ускладнення, покращує комфорт пацієнтів і спрощує робочий процес. Поєднуючи CBCT-образи, внутрішньоротове сканування та програмне забезпечення для планування, клініцисти можуть проводити віртуальні симуляції, які безперешкодно переходять у клінічне виконання. Хірургічні направляючі дозволяють імплантатам бути встановленими майже точно так, як було заплановано заздалегідь.
Реабілітація з повною аркою залишається одним з найбільших викликів імплантології, що вимагає відновлення функції, естетики та довгострокової стабільності у пацієнтів з обмеженими анатомічними орієнтирами. Цифровий робочий процес дозволяє точно планувати, адаптуючи його до кожного пацієнта, покращуючи контроль та передбачуваність протягом лікування.
Крім того, внутрішньоротові сканери дозволяють швидко, точно та неінвазивно отримувати дані. Їх висока якість виходу тепер конкурує з традиційними відбитками, пропонуючи покращений досвід для пацієнтів та негайну придатність у проектуванні протезів.
Інтеграція даних внутрішньоротового сканування з даними CBCT формує єдину цифрову модель – цифровий двійник – яка підтримує планування протезування, виготовлення хірургічних направляючих та ідентифікацію анатомічних обмежень. Штучний інтелект (ШІ) додає додатковий потенціал, обробляючи великі набори даних для допомоги в діагностиці, позиціонуванні імплантів та біомеханічному аналізі.
Клінічно ці технології призводять до більш точного розміщення імплантів, оптимізованих протезів та коротших, менш інвазивних процедур – часто полегшуючи негайне навантаження. Однак успіх також залежить від характеристик імплантів та належної підготовки. Десятиліття досліджень показали, що імпланти з вищою гідрофільністю потенційно покращують клінічні результати, прискорюючи загоєння та полегшуючи протоколи негайного навантаження.
Клініцисти повинні розуміти цифрові робочі процеси, логіку програмного забезпечення та як управляти складними випадками беззубих щелеп, де діагностика, точність і акуратність є життєво важливими. Направляюча хірургія перетворює віртуальне планування на надзвичайно точні клінічні процедури. 3D-друковані направляючі допомагають мінімізувати відхилення та зменшити хірургічну травму. Проте, підтримка високих стандартів протягом усього робочого процесу є суттєвою — від зліпків і дизайну направляючих до доставки остаточної протези. Співпраця з зуботехнічними лабораторіями є ключовою. Цифрова комунікація дозволяє створювати індивідуальні протези, які віртуально валідуються та точно виготовляються за допомогою CAD/CAM. Це підвищує ефективність, зменшує помилки та підвищує загальну якість лікування.
Врешті-решт, злиття CBCT, ШІ, внутрішньоротового сканування та 3D-друку перетворює стоматологію на прогностичну, профілактичну та персоналізовану дисципліну. Реабілітація повної дуги є прикладом переваг цього зсуву, роблячи комп'ютерно-направлену імплантологію не лише технікою, а й філософією, орієнтованою на пацієнта, заснованою на точності, безпеці та клінічній досконалості.
Клінічний випадок
85-річний частково беззубий пацієнт був направлений до нашої клініки для повної реабілітації верхньої щелепи. Пацієнт перебував у доброму загальному стані здоров'я та не курив. Його основні скарги включали труднощі при жуванні, біль у верхній щелепі та періодичний неприємний запах з рота. Клінічна та рентгенологічна оцінка виявила короткоспанну фіксовану металокерамічну протезу, підтримувану сімома передніми зубами верхньої щелепи. Протеза від'єдналася, і чотири з опорних зубів були структурно пошкоджені. Решта трьох показували різні ступені карієсу та проблеми з пародонтом. Було встановлено діагноз невдалого зубного ряду (Рис. 1 & 2).


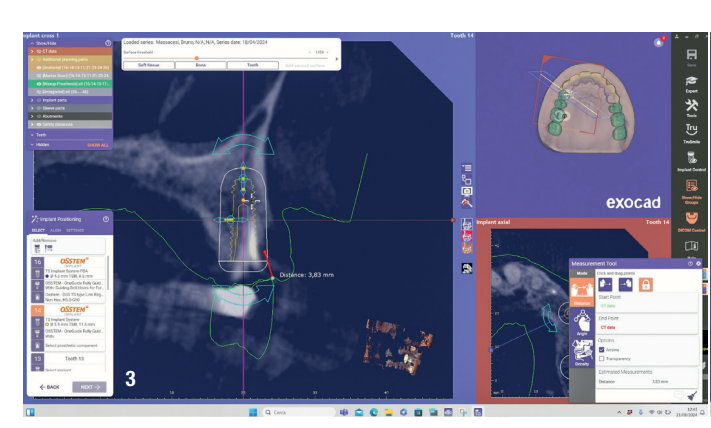
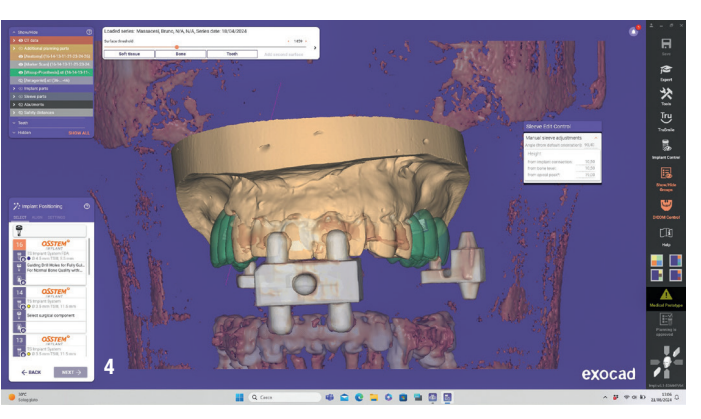
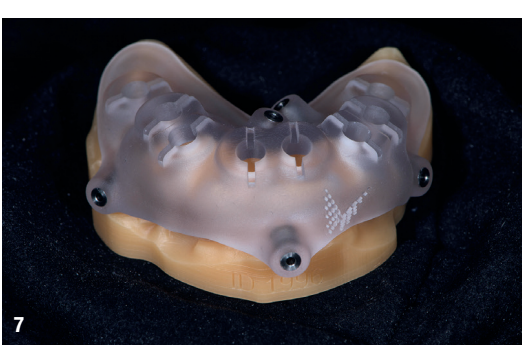
Під час початкового візиту були зроблені цифрові відбитки за допомогою сканера Medit i700 для документування залишкових зубів, м'яких тканин, існуючого протеза та протилежної дуги. Оклюзійні записи були отримані при поточному вертикальному вимірі оклюзії та в центральному співвідношенні. Рухи нижньої щелепи були зафіксовані за допомогою системи реєстрації щелеп zebris JMA (zebris Medical). Також були зроблені інтра- та екстраоральні фотографії. На основі цих записів було створено віртуальний діагностичний восковий макет і цифрову симуляцію усмішки (Smile Creator, exocad). Нарешті, було заплановано вісім імплантатів (Рис. 3 та 4) відповідно до нового воскового макету (exoplan 3.1, exocad), і заздалегідь були виготовлені як хірургічний направляючий пристрій, так і металевий тимчасовий протез (Рис. 5–7).


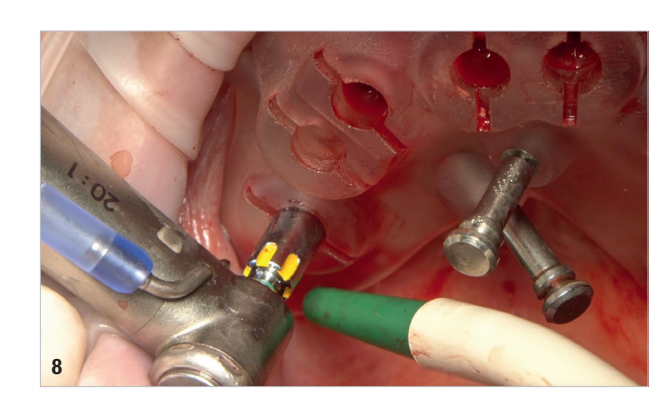
У день операції було введено місцеву анестезію, і перший хірургічний шаблон був стабілізований на залишкових зубах для підготовки п’яти місць для анкерових штифтів. Потім були видалені уражені зуби, і другий хірургічний шаблон був закріплений на підготовлених місцях для штифтів. Вісім імплантатів (Osstem TSIII SOI, Osstem Implant) були встановлені, п’ять у місцях негайного видалення і три в раніше загоєних ділянках. Усі імплантації були повністю керовані за допомогою хірургічного шаблону без металевих рукавів і спеціального хірургічного набору (OneGuide KIT, Osstem Implant; Рис. 8). Один імплантат вимагав підйому синуса кістки, що було виконано за допомогою повністю керованого підходу (OneCAS KIT, Osstem Implant; Рис. 9). Для заповнення лунок видалення та синусової порожнини використовувався ксенографт кісткового матеріалу (A-Oss, Osstem Implant). Мультиодиничні абатменти та тимчасові абатменти (Osstem Implant) були негайно встановлені на всі імплантати відповідно до концепції один абатмент, один раз. Було доставлено попередньо виготовлену тимчасову протезу на основі ПММА з металевим підкріпленням, яка була негайно зафіксована в роті. Було проведено корекції на місці, щоб уточнити протез і забезпечити правильний оклюзійний контакт (Рис. 10–12). Пацієнт отримав післяопераційні інструкції та медикаменти.




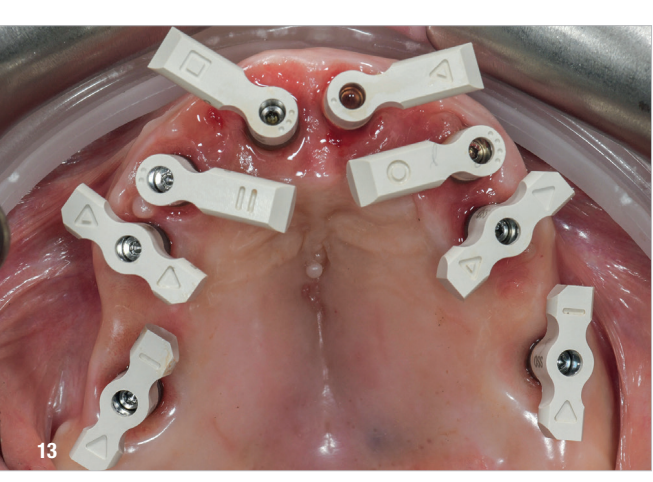
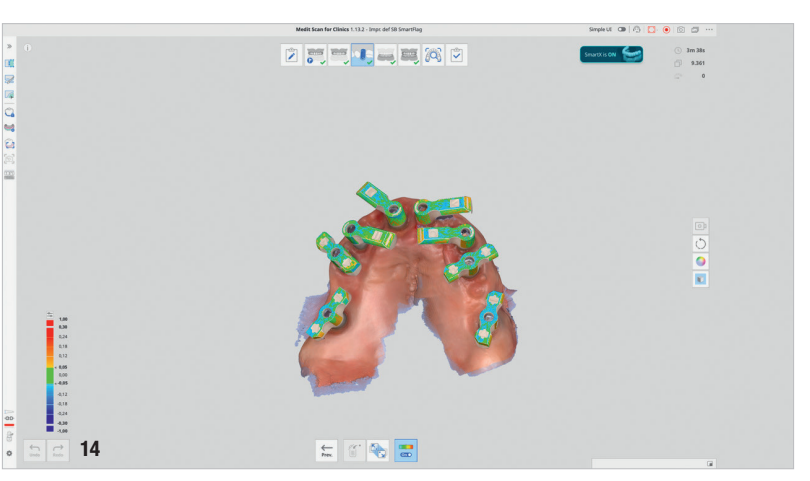
Через чотири місяці були зроблені цифрові відбитки за допомогою Medit i900. До них входили відбиток функціонального тимчасового протеза, відбиток анатомії м'яких тканин та відбиток з індивідуально спроектованими скануючими тілами, що мають бічні розширення для підвищення точності внутрішньоротового сканування (SmartFlag, APOLLO; Рис. 13). Використовувався новий цифровий робочий процес, названий Medit SmartX (Medit Link Версія 3.4.2) (Рис. 14). Ця система дозволяє в реальному часі розпізнавати та вирівнювати бібліотеки скануючих тіл, підвищуючи передбачуваність, ефективність та безпеку цифрових відбитків повної дуги. Було застосовано комбінацію технік сканування для збільшення остаточної точності: пряме та зигзагоподібне в передніх ділянках і пряме в задніх ділянках.
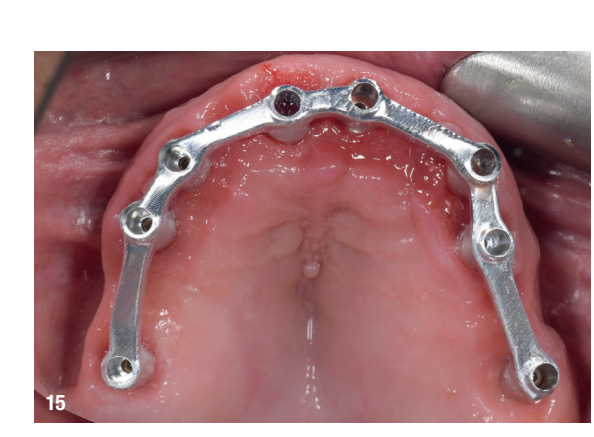
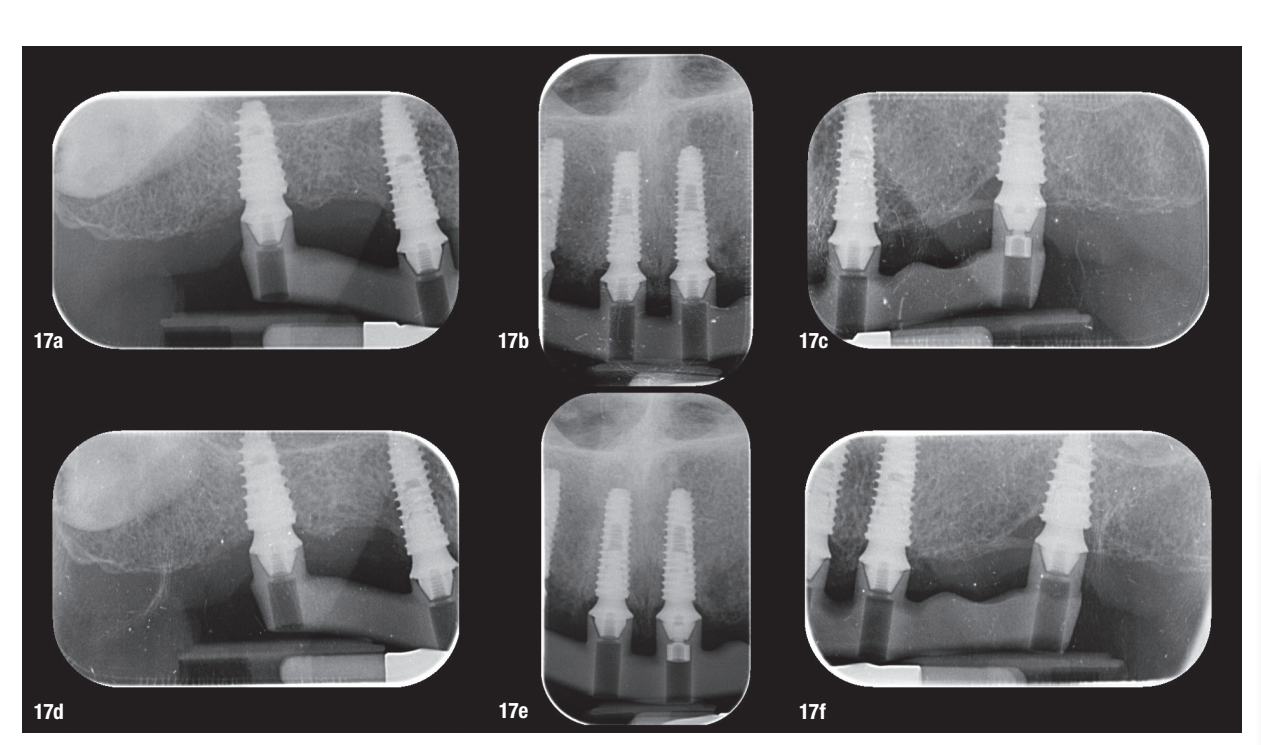
На другій зустрічі був протестований прототип PMMA, підтримуваний металевою штангою, для оцінки естетичної та функціональної точності. Пасивна посадка металевої каркасної конструкції оцінювалася за допомогою тесту з одним гвинтом (Шеффілд) та тактильної перевірки з використанням стоматологічного експлорера (Рис. 15–17f).

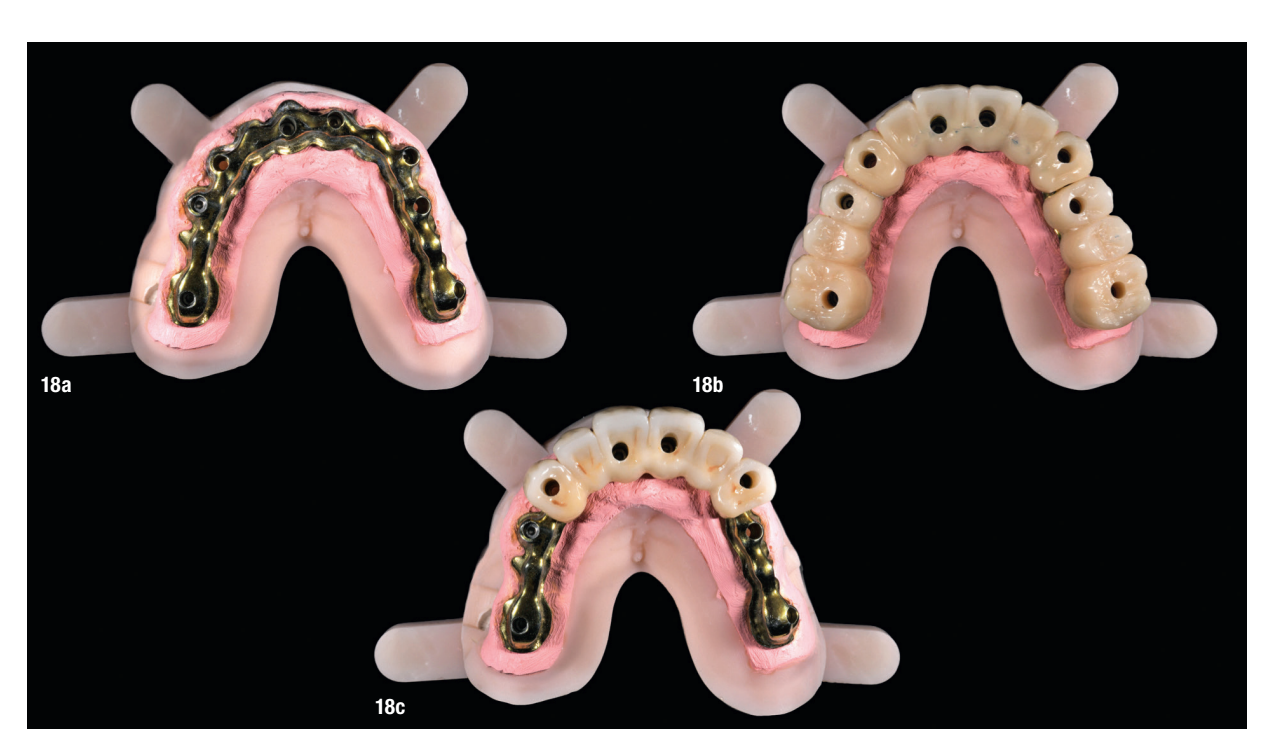
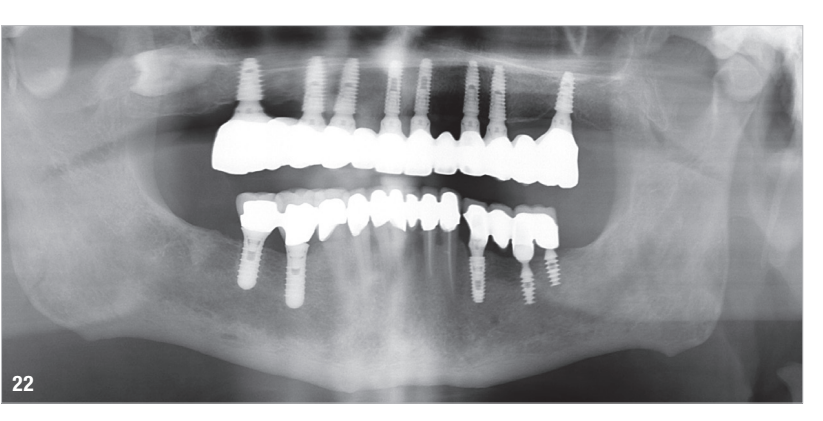
На фінальному прийомі була доставлена остаточна гібридна протеза на гвинтах. Остаточна протеза складалася з титанової основи CAD/CAM, закріпленої на всіх імплантатах, і трьох монолітних сегментів з цирконію, які були приклеєні зверху (Рис. 18a–c). Було оцінено оклюзію, і пацієнт був включений у чотиримісячну програму обслуговування. На останньому контрольному візиті (через рік після встановлення імплантатів) всі імплантати були успішними, і пацієнт був повністю задоволений новою протезою (Рис. 19–22).



Обговорення
Цей випадок підкреслює змінюючу роль цифрових технологій у досягненні високої точності та передбачуваності в реабілітації з повною архітектурою імплантів. Одним з ключових факторів довгострокового успіху в такій реабілітації є пасивна посадка остаточного протеза. Справжня пасивна посадка мінімізує механічний стрес на імпланти та навколишню кістку, зменшуючи ризик біологічних або технічних ускладнень, таких як періімплантит, розхитування гвинтів або перелом каркаса. У цьому випадку комбінація багатосекційних абатментів, внутрішньоротового сканування та металевого каркаса CAD/CAM сприяла перевірці пасивної посадки за допомогою тесту з одним гвинтом та тактильної оцінки.
Ще одним критично важливим фактором, що впливає на довгострокові клінічні результати, є 3D позиціонування імплантів. Точне розміщення імплантів з точки зору глибини, кута нахилу та мезіодистального проміжку безпосередньо впливає на посадку протеза, оклюзійну гармонію та розподіл навантаження. У беззубій верхній щелепі, де анатомічні обмеження та рухливість м'яких тканин ускладнюють ручні техніки, використання комп'ютерно-орієнтованої хірургії виявляється особливо цінним. У цьому випадку повністю кероване розміщення імплантів було полегшене цифровим плануванням та 3D-друкованим хірургічним направляючим, закріпленим за допомогою штифтів. Цей протокол дозволив мінімально інвазивний підхід та виконання підняття синуса кістки, ілюструючи, як керована хірургія може управляти анатомічною складністю з мінімальною інвазивністю. Точність, забезпечена віртуальним плануванням, безпосередньо переходить у хірургічну точність, покращуючи як передбачуваність протезування, так і результати для пацієнтів.
Інтеграція технологій внутрішньоротового сканування та CBCT-іміджінгу дозволила створити безперебійну, неінвазивну цифрову роботу від діагностичної оцінки до доставки протеза. Цей підхід забезпечив точне планування імплантів, проектування протезів та виготовлення індивідуального хірургічного направляючого, все це узгоджено з анатомією пацієнта та вимогами до протезування. На відміну від традиційних робочих процесів, цифрові інструменти зменшують ймовірність ручних помилок і пропонують значні переваги в плані комфорту пацієнта, ефективності та відтворюваності.
Ключовою інновацією в цьому випадку було використання Medit SmartX, платформи на основі штучного інтелекту, яка підвищує точність внутрішньоротового сканування, оптимізуючи розпізнавання та вирівнювання скануючого тіла. Система використовує штучний інтелект для зменшення потенційних невідповідностей під час збору даних для повного арху — одного з найкритичніших етапів у цифровій імплантології. Medit SmartX забезпечила спрощений протокол сканування, поєднуючи прямі та зигзагоподібні патерни в передніх ділянках і прямі сканування в задніх ділянках, що в кінцевому підсумку призвело до отримання наборів даних вищої якості та кращої відповідності протезів. Ці покращення були особливо корисними при управлінні повністю беззубою верхньою щелепою, де відсутність анатомічних орієнтирів може знизити цілісність даних.
Процес роботи Medit SmartX може оптимізувати принципи вирівнювання даних сканування та налаштування сканування для досягнення більш точних даних у порівнянні з традиційними процесами. Це допоможе краще підкреслити технічні переваги Medit SmartX.
Інтеграція точних і передбачуваних хірургічних наборів, таких як ті, що використовуються в цьому клінічному випадку, в поєднанні з імплантатами, розробленими з використанням передових технологій поверхні, призначених для покращення остеоінтеграції — поверхня SOI компанії Osstem Implant — відіграє важливу роль у досягненні надійних і послідовних клінічних результатів. Ці інновації не лише спрощують хірургічні процедури, але й підтримують довгостроковий успіх в імплантології, роблячи їх незамінними інструментами для сучасних стоматологів.
Незважаючи на успішний результат, цей клінічний випадок має певні обмеження. Як єдиний випадок, результати не можуть бути узагальнені для всіх клінічних сценаріїв. У пацієнта був сприятливий об'єм кістки та хороше системне здоров'я, умови, які можуть бути відсутніми у більш компрометованих осіб. Крім того, хоча система Medit SmartX продемонструвала обнадійливі результати, її довгострокова ефективність, відтворюваність у різних операторів та інтеграція з іншими програмними екосистемами потребують подальшого вивчення. Оцінка пасивної посадки спиралася на клінічні методи, які, хоча й широко прийняті, залишаються частково суб'єктивними без перевірки за допомогою цифрового аналізу напруги або вимірювань на промисловому рівні. Більше того, час і зусилля, необхідні для навчання ефективному використанню інструментів з підтримкою штучного інтелекту та повністю цифрових робочих процесів, залишаються значними. Успішне застосування вимагає не лише доступу до сучасного обладнання, але й глибокого розуміння цифрового планування, логіки програмного забезпечення та потенційних внутрішньоопераційних коригувань.
Висновок
Цей випадок підкреслює клінічну цінність повністю цифрових робочих процесів, підтримуваних технологіями з штучним інтелектом, у досягненні точного, ефективного та орієнтованого на пацієнта повного відновлення зубного ряду. Комбінація керованої хірургії, точного 3D позиціонування імплантатів та цифрових протоколів верифікації дозволяє клініцистам виготовляти протези з високою функціональною та естетичною передбачуваністю. Хоча інтеграція систем, таких як Medit SmartX, може покращити точність сканування та відповідність протезів, необхідні подальші дослідження, включаючи клінічні випробування та багатопрофільні аналізи, щоб повністю підтвердити ці інновації та визначити їх ширшу застосовність.
Марко Талларіко, Карлотта Каччіо, Барбара Массаччезі та Андреа Педетта