
en
Шлях ковзання з інструментом для пошуку шляху з рециркуляційним приводом: ефективність та частота переломів
0
17 хв читання
05 лютого 2025
Машинний переклад
Оригінальна стаття написана мовою EN (посилання для прочитання).
Анотація
Вступ: Це дослідження оцінювало кількість мезіальних і дистальних каналів нижніх молярів, в яких інструмент R-Pilot досяг робочої довжини (WL) під час процедури макро-глід-пат. Також були оцінені рівні ламкості та деформації.
Методи: Сто п’ятдесят шість кореневих каналів 52 зубів були досліджені до довжини апікального отвору. Потім інструмент R-Pilot був розташований на отворі каналу та активований. Інструмент переміщувався за допомогою руху «пек» і легкого апікального тиску. Цю процедуру повторювали в спробі досягти WL. Тип ламкості та/або деформації інструмента оцінювали за допомогою скануючої електронної мікроскопії, тоді як корені з ламкими інструментами сканувалися за допомогою мікро-комп’ютерної томографії. Відсоткова частота розподілу ламкостей, деформацій та кореневих каналів, в яких R-Pilot досяг WL, була зафіксована та статистично порівняна за допомогою тесту хі-квадрат Пірсона з α = 5%.
Результати: Інструменти R-Pilot досягли WL у 139 кореневих каналах (89.10%), а тест хі-квадрат показав значну різницю між спостережуваними частотами та очікуваними частотами (x2 = 95.41, p = 0.000). Спостережувані частоти переломів (2.56%) та деформацій (1.92%) також були значно нижчими за очікувані (перелом: x2 = 140.41, p = 0.000; деформація: x2 = 144.23, p = 0.000). Переломи відбувалися переважно в апікальних та вигнутій частинах кореневих каналів.
Висновок: R-Pilot досяг WL у 89.10% кореневих каналів нижніх молярів з частотами переломів та деформацій 2.56% та 1.92% відповідно.
Вступ
Глід-пат було визначено як клінічну процедуру для розширення або створення гладкого тунелю від корональної частини кореневого каналу до його фізіологічного терміна перед його остаточним розширенням, з метою контролю торсійного стресу та зменшення ймовірності переломів інструментів з нікель-титанового сплаву (NiTi). Основні етапи, що передували глід-пату, називаються “мікро глід-пат” і включають як сканування каналу, так і апікальну прохідність (тобто, місце виходу основного отвору), зазвичай виконуються за допомогою малих попередньо вигнутих інструментів з нержавіючої сталі та обережних рухів. Однак ці попередні процедури можуть бути складними та затратними за часом у клініках, особливо при роботі з вигнутими та/або кальцифікованими кореневими каналами. Після успішного виконання мікро глід-пату, вже досліджений канал все ще потребує подальшого розширення, процедури, яка називається “макро глід-пат”. Це виконується за допомогою або ручних інструментів, або спеціально розроблених механічно керованих інструментів NiTi, причому останні віддаються перевагою, оскільки вони асоціюються зі зменшенням післяопераційного болю та загострень, а також кращим збереженням оригінальної анатомії каналу. З іншого боку, оскільки канал все ще вузький, використання ротаційних інструментів NiTi з малими розмірами, так званих патфайдерів, було відзначено як більш схильне до переломів і непередбачуване з точки зору клінічної ефективності та безпеки. З метою подолання цих недоліків було запропоновано кілька підходів, включаючи зміни в їхньому сплаві NiTi, дизайні та, нещодавно, кінематиці руху.
Реверсивний рух відкрив нові перспективи для механічно активованої підготовки, оскільки він зменшує робочий час, циклічну втомлюваність та торсіонне навантаження інструментів у порівнянні з безперервною ротацією. Нещодавно був запущений інструмент R-Pilot (VDW GmbH, Мюнхен, Німеччина) для підготовки макро-глід-паті в реверсивному русі. R-Pilot виготовлений з M-Wire NiTi сплаву з конусністю 0.04, S-подібним перетином та неконтактним наконечником діаметром 0.125 мм. Хоча його механічні властивості були оцінені в попередніх дослідженнях, його ефективність у досягненні робочої довжини (WL) все ще невідома. Тому метою даного дослідження було оцінити частоту ламання та деформації, а також кількість кореневих каналів, в яких інструмент R-Pilot зміг досягти WL мезіальних та дистальних каналів нижніх молярів під час процедури макро-глід-паті. Робочі гіпотези цього дослідження полягали в тому, що інструменти R-Pilot (i) досягають WL у високій частоті випадків та (ii) мають низькі показники ламання/деформації.
Матеріали та методи
Оцінка розміру вибірки
На основі дослідження з подібним експериментальним дизайном, розмір ефекту для використання рециркуляційного руху для досягнення WL був визначений як 0.296. Тому, використовуючи сімейство хі-квадрат та тест на відповідність (G*Power 3.1 для Macintosh; Heinrich Heine, Universität Düsseldorf, Düsseldorf, Germany) з додатковими параметрами альфа-типу помилки 0.05 та бета-потужності 0.95, було вказано мінімальний розмір вибірки 149 кореневих каналів.
Вибір зразків
Після затвердження цього проекту місцевим етичним комітетом (протокол № 2.985.618), було випадковим чином обрано 100 перших та других нижніх молярів, видалених з причин, не пов'язаних з цим дослідженням, з пулу зубів, рентгенографованих у мезіальному та дистальному напрямках за допомогою цифрового сенсора (Schick CDR digital radiographic system; Dentsply Sirona, Charlotte, NC), та зберігалися в 0.5% розчині тимолу при 5° C. Зуби з відкритим верхівкою, резорбціями або кореневими переломами були виключені. Критерії включення складалися з нижніх молярів з помірно вигнутими коріннями (10°-20°), двома незалежними мезіальними кореневими каналами, від рівня їх отвору до їх апікального терміна, та одним або двома незалежними каналами на дистальному корені. Після цього було обрано п’ятдесят два нижніх моляра з 156 кореневими каналами.
Підготовка глід-путі
Після підготовки звичайного доступу кожен зуб був закріплений на спеціальному пристрої (IM Brazil; Сан-Паулу, SP, Бразилія), який імітує альвеолярну ямку та дозволяє підключити металевий затискач для електронного локатора верхівки (EAL), відповідно до попереднього дослідження. Як рекомендує виробник, перед використанням інструмента R-Pilot було виконано сканування кореневого каналу (мікро глід-путь) за допомогою ручного файлу розміром 25 мм .08 (C-Pilot; VDW GmbH), підключеного до EAL (Root ZX; J Morita USA Inc., Ірвайн, Каліфорнія), застосовуючи легкий до помірного тиску та обережні обертальні рухи вздовж кореневого каналу, поки екран EAL не показав позначку "0.0". WL було встановлено як цю контрольну точку.
Перед процедурою макро глід-путі всі вибрані інструменти R-Pilot були перевірені через операційний мікроскоп при збільшенні ×16, щоб виключити інструменти з критичними дефектами або деформаціями, і жоден не був виключений. Інструмент R-Pilot був потім закріплений на кутастому наконечнику (Sirona, Бенсхайм, Німеччина), що живиться електричним мотором (VDW Gold; VDW GmbH), а тримач файлу EAL був закріплений на неактивній частині леза. Після цього R-Pilot було розташовано на рівні отвору з таким же кутом введення, як у скануючого файлу, поки не відчули опір, і активовано в реверсивному русі ("RECIPROC ALL" режим). Інструмент переміщувався в апікальному напрямку, виконуючи 3 вхідно-вихідні рухи з амплітудою близько 3 мм з легким апікальним тиском, після чого його було видалено з каналу, очищено марлею, змоченою спиртом, та перевірено на наявність тріщин або деформацій. Потім кореневий канал був промитий 2 мл 2.5% натрію гіпохлориту. Цю процедуру повторювали 3 рази в спробі досягти WL. Після цього, якщо інструмент не досяг WL, ця процедура була зупинена.
Було зафіксовано кількість переломів, деформацій та кореневих каналів, в яких інструмент R-Pilot досягнув робочої довжини (WL). Тип перелому та/або деформації визначався при збільшеннях ×200 до ×2000 за допомогою скануючої електронної мікроскопії (SEM) (JEOL JSM 6510 LV; JEOL, Токіо, Японія) після ультразвукового очищення інструментів. Крім того, корені з переламаним інструментом були проскановані в мікрокомп'ютерному томографі (мікро-CT) (SkyScan 1173; Bruker microCT, Контіх, Бельгія), що працював на 80 кВ і 100 мА, з ізотропним розділення
Статистичний аналіз
Відсоткова частота розподілу (%) зразків, в яких інструмент R-Pilot досяг і не досяг робочої довжини (WL), була зафіксована та статистично порівняна за допомогою тесту хі-квадрат Пірсона. Альфа-тип помилки та критичний хі-квадрат були встановлені на рівні 0.05 та 3.84 відповідно, як зазначено в розрахунках потужності вибірки.
Результати
В цілому, інструменти R-Pilot досягли робочої довжини в 139 кореневих каналах (89.10%). Тест хі-квадрат показав, що спостережувані частоти, в яких R-Pilot досяг робочої довжини, суттєво відрізнялися від очікуваних частот (x2 = 95.41, p = 0.000). Під час експерименту було зафіксовано тріщини в 4 інструментах (2.56%), які були класифіковані як змішані (n = 3) та торсійні (n = 1) (Рисунок 1A-D), тоді як 3 інструменти (1.92%) показали деформацію леза (Рисунок 2). Аналіз хі-квадрат продемонстрував, що спостережувані частоти тріщин і деформацій також були суттєво нижчими за очікувані (тріщина: x2 = 140.41, p = 0.000; деформація: x2 = 144.23, p = 0.000). Рисунок 1A-D показує 3D моделі, отримані за допомогою мікро-CT сканування 4 коренів, що зображують зламані інструменти, розташовані переважно в апікальній частині кореня з розмірами від 0.67 до 0.85 мм.
Обговорення
Інструменти R-Pilot досягли WL у 139 з 156 мезіальних і дистальних кореневих каналів (89.10%) молярів нижньої щелепи з низьким відсотком частоти переломів і деформацій. Таким чином, робочі гіпотези цього дослідження були підтверджені. Отримані результати є досить цікавими, особливо в порівнянні з можливістю ротаційно-приведених інструментів для прокладання шляхів досягати апікального отвору (38.30-68.30%). Отримані результати можна пояснити трьома основними причинами: (i) асиметрична реверсивна кінематика, яка підтримує апікальний прогрес інструмента, зменшуючи торсійне навантаження, (ii) конструкція інструмента з маленьким діаметром наконечника (0.125 мм) і постійним конусом (0.04 мм), що мінімізує його контакт з дентиновими стінками, і (iii) S-подібний перетин, який забезпечує ефективну різальну здатність.
Під час підготовки основного шляху, інструмент для знаходження шляху піддається механічному навантаженню і може зламатися внаслідок крутильного або циклічного втомлення. Оскільки інструменти для знаходження шляху є більш гнучкими через свої менші розміри, циклічне втомлення, здається, є менш актуальним, ніж крутильний стрес як причина зламу інструмента. У даному дослідженні було зафіксовано дуже низькі показники зламу (2.56%) та деформації (1.92%), а кореляційний підхід до візуалізації дозволив якісно зрозуміти причини відмови інструмента. Зламані інструменти були оцінені за допомогою SEM-аналізу, а 4 кореня з фрагментами R-Pilot були відскановані в мікро-КТ пристрої. SEM-аналіз продемонстрував змішані типи зламів у 3 інструментах і крутильну відмову в іншому інструменті (Рисунок 1A-D), тоді як аналіз 3D моделей показав, що 2 з коренів мали відносно прямі, але вузькі кореневі канали, і злам стався в середній (n = 1) та апікальній (n = 1) третинах, тоді як інші інструменти зламалися на вигині апікального каналу (Рисунок 1A-D). Можна припустити, що випадок єдиного типу крутильного зламу був наслідком реверсивного руху, який ефективно уникав явища затискання конуса, що часто відбувається під час безперервного обертання. З іншого боку, змішані злами, можливо, були пов'язані з оператором. Просування цього типу інструмента до апексу є дещо складним, і не є незвичним, що оператор збільшує тиск на нього, викликаючи його вигин через низький конус і малий стержень. Враховуючи все це, збільшена флексія, затискання кінчика та апікальна вигнута форма, ймовірно, були причинами змішаних зламів.
Кілька досліджень показали ефективність електронних апаратів для визначення робочої довжини (EAL), демонструючи, що електронний метод є найкращим способом для правильного визначення робочої довжини. Крім того, Root ZX зазвичай вважається золотим стандартом EAL. Показник 0.0 на EAL є важливим, оскільки він вказує на визначення основного апікального отвору. Таким чином, у цьому дослідженні показник 0.0 Root ZX використовувався як контрольна точка для оцінки роботи інструментів R-Pilot.
У порівняльних дослідженнях надзвичайно важливо стандартизувати зразок, щоб уникнути упереджень, пов'язаних з морфологією кореневих каналів. Однак дане дослідження не було порівняльним. Тому були обрані кореневі канали з помірною кривизною, враховуючи їх високу частоту в нижніх молярах і тому, що вони представляють клінічний виклик для виконання процедур створення глайд-пату. Усі кореневі канали, очевидно, були прохідними, оскільки сканування було успішно виконано за допомогою ручного файлу .08. Це означає, що жодні значні анатомічні труднощі не можуть вважатися основною причиною того, що інструменти R-Pilot не досягли робочої довжини. Можливо, дентинний бруд, що утворився під час управління глайд-патом, був запакований у апікальний канал, що заважало інструментам досягти отвору, що лише підкреслює важливість іригації кореневих каналів; однак це ще потрібно довести в подальших дослідженнях.
Оцінка відсоткової частоти, з якою інструменти для прокладання шляхів досягали WL без поломок або спотворень, здається найкращим методом для ранжування їхньої продуктивності та безпеки. У цьому сенсі методологія, застосована в цьому дослідженні, дуже добре підходить для цієї мети. Також важливо підкреслити, що в дослідженні частоти певної події в популяції контрольна група не є обов'язковою. Наприклад, у даному дослідженні статистична процедура хі-квадрат адекватно підтверджує значущість спостережуваних частот. Таким чином, природа даного дослідження не була порівняльною, і не потрібна була референтна група, оскільки основною метою було обмежено спостереження за продуктивністю інструментів R-Pilot, перших реверсивних інструментів для прокладання шляхів, які були представлені на ринку. Цей момент можна вважати обмеженням даного дослідження, але слід врахувати великий розмір вибірки, необхідний для отримання надійного профілю продуктивності певного інструмента. Тому подальші дослідження з використанням запропонованого методу необхідні для оцінки продуктивності новіших інструментів для прокладання шляхів з реверсивним приводом.
Легенди до малюнків
Малюнок 1. Різні види 3D моделей 4 коренів, що зображують кореневі канали (в синьому) та зламані інструменти (в червоному), розташовані в найвужчих частинах (A) мезіолінгвального каналу, (B) мезіобукального каналу, (C) вигнутій частині апікальної третини дистального каналу та (D) вигнутій частині апікальної третини мезіолінгвального каналу, а також зображення SEM змішаного зламу в (a), (c) та (d) і торсіонного зламу в (b).
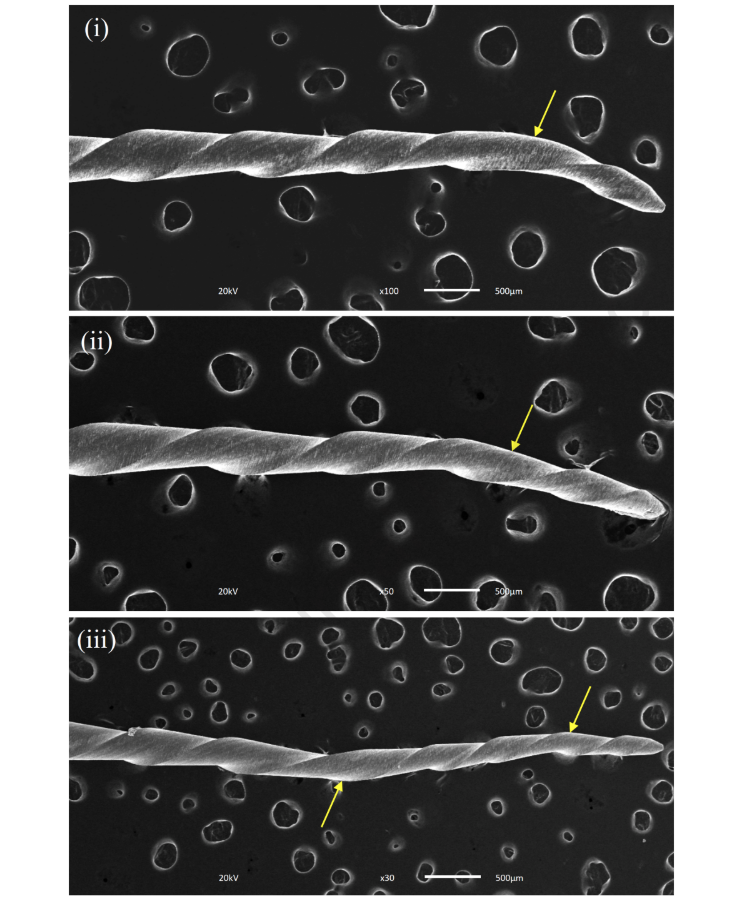
Малюнок 2. Зображення SEM, що показують апікальну частину інструментів з деформацією леза, жовті стрілки вказують на точки деформації.
Висновки
За умов даного дослідження можна зробити висновок, що інструменти R-Pilot досягли робочої довжини (WL) у 89,10% раніше обстежених мезіальних і дистальних каналів нижніх молярів з рівнями зламу та деформації 2,56% та 1,92% відповідно.
Автори: Густаво Де-Деус, Мілла Лесса Кардозо, Марко Сімойнс-Карвальо, Еммануель Жоао Ногейра Леал да Сілва, Феліпе Гонсалвес Белладонна, Даніеле Мореїра Кавалканте, Діого да Сілва Олівейра, Ерік Міранда Соузу, Рікардо Тадеу Лопес, Марко Ауреліо Версіяні
Посилання:
- West JD. Ендодонтичний глід-пат: “секрет безпеки ротаційних інструментів”. Dent Today 2010;29:90-3.
- Ruddle CJ, Machtou P, West D. Підготовка ендодонтичного каналу: нові інновації в управлінні глід-патом та формуванні каналів. Dent Today 2014;33:1-7.
- Van der Vyver PJ. Створення глід-пату для ротаційних інструментів NiTi: перша частина. Int Dent J 2010;13:6-10.
- Van der Vyver PJ. ProGlider™: клінічний протокол. Endod Practice 2014;7:42-7.
- Jonker CH, Van der Vyver PJ, De Wet FA. Вплив підготовки глід-пату на рівень відмов ротаційних інструментів WaveOne. SADJ 2014;69:266-9.
- Berutti E, Negro AR, Lendini M, Pasqualini D. Вплив ручного попереднього розширення та крутного моменту на рівень відмов ротаційних інструментів ProTaper. J Endod 2004;30:228-30.
- Patiño PV, Biedma BM, Liébana CR, Cantatore G, Bahillo JG. Вплив ручного глід-пату на рівень розділення ротаційних інструментів NiTi. J Endod 2005;31:114-6.
- Pasqualini D, Bianchi CC, Paolino DS та ін. Обчислене мікротомографічне оцінювання глід-пату з ротаційним PathFile з нікель-титаном у вигнутому каналі верхніх перших молярів. J Endod 2012;38:389-93.
- Berutti E, Cantatore G, Castellucci A та ін. Використання ротаційного PathFile з нікель-титаном для створення глід-пату: порівняння з ручним попереднім розширенням у змодельованих кореневих каналах. J Endod 2009;35:408-12.
- De-Deus G, Belladonna FG, Souza EM та ін. Здатність до пошуку 4 інструментів для знаходження шляхів у помірно вигнутих каналах молярів. J Endod 2016;42:1540-4.
- Pasqualini D, Mollo L, Scotti N та ін. Післяопераційний біль після ручного та механічного глід-пату: рандомізоване клінічне дослідження. J Endod 2012;38:32-6.
- Elnaghy AM, Elsaka SE. Оцінка транспортування кореневого каналу, співвідношення центрування та залишкової товщини дентину, пов'язаних з інструментами ProTaper Next з глід-патом та без нього. J Endod 2014;40:2053-6.
- Arias A, Singh R, Peters OA. Відмінності в крутному виконанні одноразових та багаторазових ротаційних систем інструментів для підготовки глід-пату. Odontology 2016;104:192-8.
- Grande NM, Ahmed HM, Cohen S та ін. Поточна оцінка рециркуляції в ендодонтичній підготовці: всебічний огляд - частина I: Історичні перспективи та сучасні застосування. J Endod 2015;41:1778-83.
- Plotino G, Ahmed HM, Grande NM та ін. Поточна оцінка рециркуляції в ендодонтичній підготовці: всебічний огляд - частина II: Властивості та ефективність. J Endod 2015;41:1939-50.
- Keskin C, İnan U, Demiral M, Keleş A. Стійкість до циклічної втоми інструментів R-Pilot, WaveOne Gold Glider та ProGlider для глід-пату. Clin Oral Invest 2018;22:3007-12.
- Özyürek T, Uslu G, Gündoğar M, Yılmaz K, Grande NM, Plotino G. Порівняння стійкості до циклічної втоми та властивостей вигину двох ротаційних файлів з нікель-титану для глід-пату. Int Endod J 2018;51:1047-52.
- Topçuoğlu HS, Topçuoğlu G, Kafdağ Ö, Arslan H. Стійкість до циклічної втоми нових ротаційних файлів для глід-пату в каналах з вигином 45 і 60 градусів. Int Endod J 2018;51:1053-8.
- Yılmaz K, Uslu G, Gündoğar M, Özyürek T, Grande NM, Plotino G. Стійкість до циклічної втоми кількох ротаційних та рециркуляційних інструментів для глід-пату з нікель-титану при температурі тіла. Int Endod J 2018;51:924-30.
- Santos CB, Simões-Carvalho M, Perez R та ін. Стійкість до крутної втоми систем рециркуляції R-Pilot та WaveOne Gold Glider NiTi для глід-пату. Int Endod J 2019;52:874-9.
- Sung SY, Ha JH, Kwak SW, Abed RE, Byeon K, Kim HC. Стійкість до крутної та циклічної втоми інструментів для підготовки глід-пату: G-file та PathFile. Scanning 2014;36:500-6.
- Gambarini G, Plotino G, Sannino GP та ін. Циклічна втома інструментів для ендодонтичного глід-пату. Odontology 2015;103:56-60.
- Martins JNR, Marques D, Mata A, Caramês J. Клінічна ефективність електронних локаторів верхівки: систематичний огляд. J Endod 2014;40:759-77.
- Tsesis I, Blazer T, Ben-Izhack G та ін. Точність електронних локаторів верхівки в визначенні робочої довжини: систематичний огляд та мета-аналіз літератури. J Endod 2015;41:1818-23.
- Stöber EA, Duran-Sindreu F, Mercadé M, Vera J, Bueno R, Roig M. Оцінка локаторів верхівки Root ZX та iPex: дослідження in vivo. J Endod 2011;37:608-10.
